第四届智能车竞赛技术报告

1 光电传感器的原理
本文引用地址:https://www.eepw.com.cn/article/112025.htm光电传感器检测路面信息的原理是由发射管发射一定波长的红外线,经地面反射到接收管。由于在黑色和白色上反射系数不同,在黑色上大部分光线被吸收,而白色上可以反射回大部分光线,所以接收到的反射光强是不一样,进而导致接收管的特性曲线发生变化程度不同,而从外部观测可以近似认为接收管两端输出电阻不同,进而经分压后的电压就不一样,就可以将黑白路面区分开来。
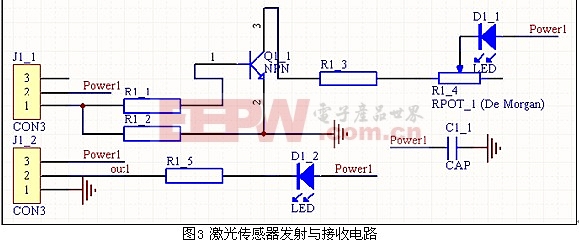
2 激光传感器的设计
激光传感器与普通的光电传感器原理都是一样,但是其前瞻能力远大于普通的光电传感器,可以达到40~50 cm,对于智能车来说已经足够。在竞赛中,规则规定传感器最多不能超过16 个,我们选用了15个激光传感器,所有的传感器呈“一”字排布。激光传感器由两部份构成,一部份为发射部份,一部分为接收部份。发射部份由一个振荡管发出180kHz 频率的振荡波后,经三极管放大,激光管发光;接收部份由一个相匹配180KHz 的接收管接收返回的光强,经过电容滤波后直接接入S12 单片机的PA 与PM口,检测返回电压的高低。由于激光传感器使用了调制处理,接收管只能接受相同频率的反射光,因而可以有效防止可见光对反射激光的影响。
为了简化15 路激光传感器的控制,减少激光传感器相互之间的干扰,传感器的控制采用了分时发光的策略,使用74LS154 作为分时控制器,由S12 的3 个IO 口来控制7 组传感器的开断,同一时间控制每组相隔最远的两路传感器发光,这样接收管就接收不到相邻传感器发射的激光了,因而达到了防止相互传感器之间干扰的目的。
参考文献:
[1] 邵贝贝. 嵌入式实时操作系统[LC/OS-Ⅱ(第2 版)[M]. 北京.清华大学出版社.2004
[2] 邵贝贝. 单片机嵌入式应用的在线开发方法[M].北京.清华大学出版社.2004
[3] 王晓明. 电动机的单片机控制[M].北京. 北京航空航天大学出版社.2002
[4] 臧杰,阎岩. 汽车构造[M]. 北京. 机械工业出版社.2005
[5] 安鹏,马伟.S12 单片机模块应用及程序调试[J]. 电子产品世界. 2006.第211期. 162-163

伺服电机相关文章:伺服电机工作原理











评论