关于智能车模起跑线识别方法的设计与实现
—— Scratch Line Identification Method Design and Realization for Intelligent Smart-Car Model

引言
本文引用地址:https://www.eepw.com.cn/article/95520.htm本设计基于“飞思卡尔”杯(Freescale)全国大学生智能车模竞赛[1],提出车模的记忆路况算法中的起跑线识别设计。车模的行进速度和稳定性的硬件因素主要取决于巡线传感器和舵机偏转速度,软件因素主要取决于巡线算法。目前采用红外光电传感器作为巡线传感器,舵机的偏转参数为60°/0.18s,如果在巡线算法上采用路况记忆和分析算法,车模在进入第二圈运行时就可“预知”前方路况,这对提高车速是很有利的。这就需要车模系统能够识别起跑线,因为起跑线是车模进行记忆和路况分析的标志点,本文就针对识别起跑线问题进行探讨。
车模与赛道的相关参数
车模比赛中有许多规定及技术参数,这里列举一些相关参数,以便后面的叙述与计算。相关参数如图1所示。
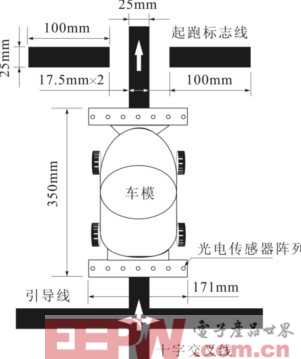
图1 车模及赛道的相关参数




















评论