基于微处理器的紧耦合组合导航系统设计

1 引 言
全球定位系统( GPS)具有全球覆盖、全天候、实时导航、导航定位误差不随时间积累等优点。但是,GPS卫星信号容易受到人为干扰;在高动态环境下,将产生较大的卫星信号跟踪误差, 不能满足载体实时导航与制导要求。
惯性导航系统具有自主式、隐蔽性导航, 工作环境不受介质限制, 能提供丰富的导航信息, 以及导航数据输出率高等优点。
由于GPS 与惯导均存在其自身难于克服的缺陷。因此, 在实际工程应用中, GPS /惯导组合导航系统设计和应用较为广泛。如图1所示。GPS与惯导组合后的优势在于:
( 1)克服各自缺点, 取长补短, 组合导航精度高于两个系统独立工作的精度;( 2)提供利用GPS导航信息校正惯性传感器的有效手段, 实现惯导系统在线校正;( 3)当载体机动或干扰使卫星信号失锁时, 可以暂时由惯导系统提供导航数据;( 4)惯导系统提供连续宽带的位置、速度和姿态估计比单独使用GPS的结果平滑;( 5)利用惯导系统速度信息辅助GPS接收机跟踪环, 可以增大等效噪声带宽, 既保证在高动态环境下对卫星信号的稳定跟踪, 又提高接收机的抗干扰性能;( 6)组合系统有利于GPS卫星信号的完整性监测, 增强系统可靠性能和容错能力;( 7)对于GPS 载波相位测量, 惯导系统提供的信息有利于GPS卫星整周模糊度参量的快速解算,可以很好地解决周跳探测与修复问题, 并且降低至少4颗卫星同步可观测的要求;( 8)采用中、低精度的惯性仪表与GPS OEM 板集成, 不仅技术上容易实现, 满足实际应用的精度要求, 而且设备研制成本低, 可以获得较好的经济效益。
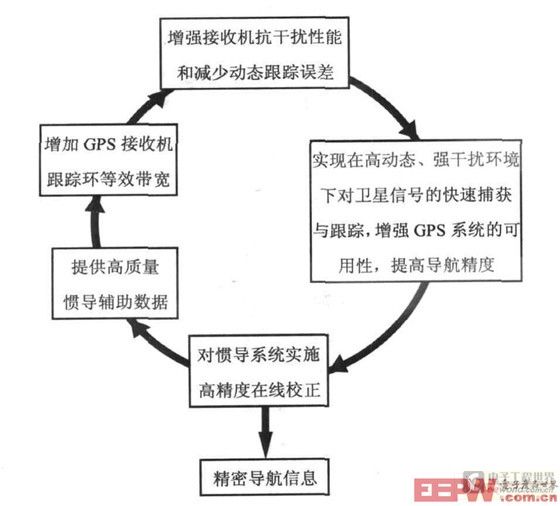
图1 GPS /惯导组合导航系统的互补性
2 GPS /惯导组合模式
依据不同的分类标准, GPS 与惯导系统有多种组合形式, 但其本质都是一致的。其中较为先进的是利用伪距和伪距率信息的紧耦合组合模式。如图2所示, 紧耦合模式的优点在于:
( 1) GPS与惯导系统集成, 实现硬件一体化, 导航计算精度高, 实际应用更为有效。
( 2)不需要同时跟踪4 颗以上的卫星, 才能进行组合导航计算。
( 3)使用一个卡尔曼滤波器, 当GPS 不能正常工作时, 惯导系统暂时提供导航参数。
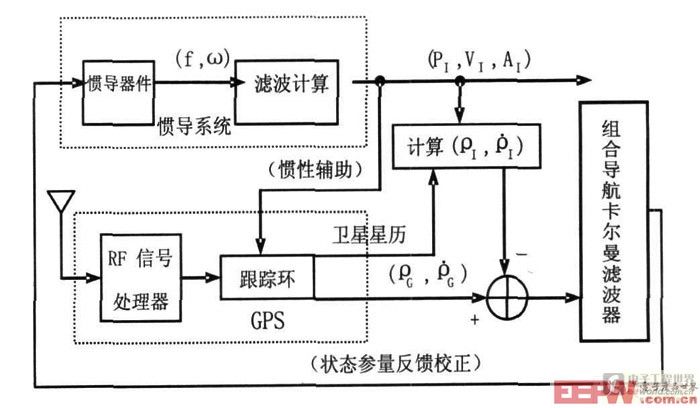
图2 GPS /惯导紧耦合模式原理框图




评论