基于MEMS的惯性导航教学实验系统*
 加入技术交流群
加入技术交流群

扫码加入
和技术大咖面对面交流
海量资料库查询
引言
惯性导航系统具有导航信息完备、连续,完全自主性和高可靠性的特点,在军事领域得到了广泛的应用,惯性技术的发展直接影响了一个国家武器装备现代化的水平。随着惯性技术的发展[1],尤其是MEMS技术的日益成熟,惯性系统的成本大幅度降低,惯性技术在民用领域也得到了越来越广泛的应用。目前,国内高校很多都已经开设了导航及相关专业,但是长期以来都缺乏一个系统的行之有效的教学实验系统。基于此,设计了一套基于MEMS的惯性导航实验系统,系统由惯性测量单元,上位机,双轴电动转台及转台控制器组成。该惯性测量单元由六轴惯性测量组合[2-4],包含三轴陀螺仪、三轴加速度计,该实验平台能满足导航、制导与控制专业的学生了解惯性导航原理,有助于学生理解、熟悉、掌握惯性导航和运动状态采集的原理、技术及应用。该系统不仅仅是教学实验系统,同时,也是一个二次开发平台,可以作为其他实验和项目的数据采集验证平台。
1 MEMS惯性测量单元
本系统使用的MEMS惯性测量单元为西安中星测控有限公司研发的六自由度惯性测量单元,型号CS-IMU-04A,该MEMS可精确测量载体坐标系中三个正交轴的角速率和线加速度[5]。采用最新MEMS惯性测量元件,并对传感器输出噪声进行了滤波,对温度漂移、交叉耦合、非线性等误差项进行了修正,提高了系统测量精度。该产品体积小、可靠性高、功耗小、重量轻、性能稳定,可用于平台稳定、姿态航向参考系统、导弹制导和控制、飞行器稳定控制、天线稳定、汽车电子等系统。
1.1 工作原理及性能指标
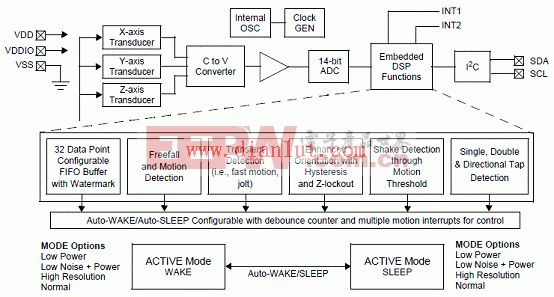
惯性测量单元CS-IMU-04A采用陀螺仪来测量载体的绝对加速度,然后载体的姿态角(俯仰角、偏航角、滚动角)就可以通过陀螺输出数据的特定的解算方法(如四元数法)来获得。加速度计可用于确定CS-IMU-04A系列初始姿态角,并修正和确定陀螺在水平方向(俯仰角和滚动角)的漂移。CS-IMU-04A硬件原理如图1所示。

图1 CS-IMU-04A硬件框图
惯性测量单元CS-IMU-04A启动时间小于1s,角速度陀螺仪(X轴,Y轴和Z轴)测量范围为±150°/s,零偏≤±0.5°/s,加速度计(X轴,Y轴和Z轴)测量范围±10g,零偏≤0.02g,工作电压+10~+30V DC,输入电流≤200mA(+20VDC)。
1.2 接口定义
CS-IMU-04A惯性测量单元,采用九芯屏蔽电缆与外部设备相连,接口使用RS-422串口通信方式,串口通信协议为8位数据位,1位起始位,1位停止位,无奇偶校验,波特率115200bps,数据更新率为200Hz。接口的外部特征及信号定义如表1所示。
表1 CS-IMU-04A接口定义

在搭建硬件系统时,上位机与CS-IMU-04A惯性测量单元之间通过RS-422串口进行通信。MEMS通电后,自动通过串口向上位机发送测量数据,因此在硬件设计时,MEMS接口只需要用到VCC、GND、RS422 TX+和RS422 TX-四个端口。
1.3 数据帧格式
每帧CS-IMU-04A向外部发送的数据包含17个字节。其中,第1,2字节为帧起始字节,取值分别为0x7F和0x80。第3~14字节为陀螺仪和加表输出,共6路数据,其中第3、4字节为X轴加速度计的低、高字节,第5、6字节为Y轴加速度计的低、高字节,第7、8字节为Z轴加速度计的低、高字节,第9、10字节为X轴陀螺仪的低、高字节,第11、12字节为Y轴陀螺仪的低、高字节,其中第13、14字节为Z轴陀螺仪的低、高字节。第15、16位为内部温度的低、高字节。第17字节为数据帧校验字,取第3~16字节的算术和的反码。
每路输出值由两字节租出,为带符号整数,取值范围-32511~32511。各通道测量值可通过公式计算得到,计算公式如下:
 (1)
(1)
其中:x为通道输出的测量数据;
Fs为该通道量程,其中加速度计的量程为±10g,角速率陀螺仪量程为±150°/s,温度的量程为±200℃;
y为通道的实际测量值。
2 转台及转台控制器
实验用到的双轴电动转台型号为TT-3DM-2E-10,转台控制器型号为CC-3DM-2E-10,均由上海紫航电子科技有限公司研发制造,为MEMS惯性测量单元提供激励信号,配套有双轴电动转台测控软件。
2.1 双轴电动转台
双轴电动转台TT-3DM-2E-10采用UO形铝合金框架结构,转台由外环轴俯仰轴框架和内环横滚轴框架和组成,内外框架轴组成相互垂直的两维旋转坐标系,采集控制器串行接口连接上位机实现测量控制。双轴电动转台外形如图2所示。

图2 TT-3DM-2E-10双轴电动转台
2.2 双轴电动转台控制器
双轴电动转台控制器用于控制双轴电动转台。转台控制器前后面板如图3所示。


图3 CC-3DM-2E-10双轴电动转台控制器
前面板:
“启动”按钮:测试控制器加电和断电(直流电)。
后面板:
“ON/OFF”:测试控制器供电开关(AC220V);
“COM1”串口1:通过DL-232和上位机的COM1口连接;
“COM2”串口2:通过DL-232和上位机的COM2口连接;
“CZ1”插座:通过DL1双轴电动转台TT-3DM-2E-10的CZ连接;
“AC 220”插座:交流220V输入。
2.3 双轴电动转台测控软件
双轴电动转台测控软件是系统配套软件,软件界面主要分四个功能区:参数设置、主演示、控制台、串口状态显示,另外还有一个数据操作功能选项,如图4所示。

图4 双轴电动转台测控软件
3 软件设计
上位机软件通过RS422串行接口与MEMS单元进行通信,完成MEMS输出数据的采集工作,然后对数据进行相关的处理,再完成数据的存储与显示。软件使用C#语言编程完成[6,7],操作系统Windows7,在功能实现上,通过SerialPort类实现串口通信功能[8],通过多线程计数完成数据的实时采集、处理和显示。
3.1 系统模块及功能
软件主要由串口设置、数据采集、数据处理、数据显示、数据存储等模块组成。
(1)串口设置:此模块主要用来设置串口端口号及波特率。根据MEMS的通信协议,上位机串口的波特率设置为115200,在软件窗口初始化时通过SerialPort类的GetPortNames方法获取当前上位机的串行端口名称数组,并显示在窗口端口号的ComboBox控件中,以供用户进行选择。串口设置完毕后,通过按键,根据当前串口状态控制串口的开启或关闭。
(2)数据采集:此模块主要完成对MEMS输出的数据进行采集。使用串口的DataReceived事件实现对串口数据的接收处理,当串口处于开启状态时,如果从MEMS有数据传输过来,就自动触发DataRecevied事件,再通过该事件注册的方法完成对串口数据的采集。
(3)数据处理:当接收到MEMS传输的一组数据时,将串口数据存储在临时数组里,根据MEMS数据帧格式和数据的长度判断当前数据的有效性。当数据有效时,提取数据帧里的有效数据(陀螺仪角速率信息,加速度计信息,温度信息),通过公式1得到实际测量值。当数据无效时,直接舍弃当前数据并开始采集下一组数据。
(4)数据存储:根据数据处理的结果,将最后得到的模拟量数据存储在数据库里,可用于后续数据的分析和处理。
(5)数据显示:根据数据处理的结果,将数据以图表的形式显示在系统主界面上。
3.2 系统主界面和运行效果
本系统经过长期运行工作,数据能够正常采集、处理和显示。能够将MEMS输出数据正确读取、处理、并按规定格式处理,达到了设计预期效果。系统主界面如图5所示。

图5 MEMS微惯组演示系统界面
系统界面分为参数设置区、串口数据接收区、数据显示区。
(1)参数设置区:在参数设置区,可以对串口端口号和波特率进行设置。在端口号下拉控件里显示当前上位机可用的串口号,选择用于接收MEMS数据的串口号即可;在波特率设置选择波特率,根据MEMS的通信协议,选择115200即可。参数设置完毕后,点击“开始测试”按键,系统开始工作,此时该按键变成“停止测试”,按下此按键即可停止当前测试任务,此时该按键重新变成“开始测试”。“重置”按键可以复位接收的字节数计数器并更新界面。另外,设置了两个CheckBox,分别是“十六进制显示”和“自动新行”,可设置串行数据接收区的数据显示格式。
(2)串口数据接收区:默认选中“十六进制显示”和“自动新行”,采集的MEMS原始数据将在串口数据接收区的文本框实时显示十六进制数据,并自动换行;有效数据文本框实时显示当前接收到的MEMS有效数据。通过分析串行数据接收区的数据,可对数据的有效性进行判断。
(3)数据显示区:通过动态显示的方式,将MEMS输出的7路信号(三路陀螺仪,三路加表,一路温度计)以数据曲线的形式显示在程序界面上。同时通过7个textBox显示当前惯组各通道的测量值。
4 小结
本文使用MEMS惯性测量单元,上位机,双轴电动转台及转台控制器设计了一套基于MEMS的惯性导航实验系统,经过长时间的使用,系统能够正常采集、处理和显示MEMS输出的数据。该系统有助于学生了解惯性导航原理,理解、熟悉、掌握惯性导航和运动状态采集的原理、技术及应用。该系统不仅仅是教学实验系统,同时,也是一个二次开发平台,可以作为其他实验和项目的数据采集验证平台。
[1] 基金项目:军内科研项目支持
参考文献
[1] 薛连莉,陈少春,陈效真. 2017年国外惯性技术发展与回顾[J]. 导航与控制,2018,17(2):1-9.
[2] 成宇翔,张卫平,陈文元,等. MEMS微陀螺仪研究进展[J]. 微纳电子技术,2011,48(5):277-285.
[3] 曹玉珍,蔡伟超,程旸. 基于MEMS加速度传感器的人体姿态检测技术[J]. 纳米技术与精密工程,2010,8(1):37-41.
[4] 伍文双,冯华君,徐之海,等. 基于MEMS陀螺仪的光学图像拼接[J]. 光子学报,2018,47(3):221-224.
[5] 杨梦雨,管雪元,李文胜. 基于MEMS/GPS/地磁组合的弹体姿态解算[J]. 电子测量技术,2017,40(4):60-63.
[6] 王琦,王磊,江豪,等. 基于C#的PLC 数据采集监控系统研发与应用[J]. 自动化与仪器仪表,2019,8:176-178.
[7] 姜拓,张剑平. 基于C#的数据采集系统上位机软件设计与实现[J]. 电子测试,2009,9:58-61.
[8] 周阳,周美娇,黄波,等. 基于C# 的串口通信系统的设计与研究[J]. 电子测量技术,2015,38(7):135-140.
(注:本文来源于《电子产品世界》杂志2020年10月期)








评论