基于组合导航的汽车姿态数据采集系统设计
作者/ 王贇贇 李建民 侯文 中北大学 信息与通信工程学院(山西 太原 030051)
本文引用地址:http://www.eepw.com.cn/article/201612/342195.htm摘要:本文设计了一个基于组合导航的汽车姿态数据采集系统,该系统利用集加速度计和陀螺仪于一体的高精度高灵敏度的惯性测量芯片MPU6050,结合地磁传感器形成的九轴传感器,对汽车的线性加速度、角速度参数数据进行直接采集,以互补滤波实现九轴传感器的误差补偿,用四元数法对其姿态解算,得到汽车姿态角度。同时,利用卡尔曼滤波法将捷联惯导和GPS结合,形成的组合导航系统实现汽车实时定位,提供汽车实时速度和位移。实验测试结果表明,该数据采集系统得到的数据准确率高,实时定位准,能够可靠地为汽车安全策略研究提供数据,有着广阔的使用价值。
引言
交通事故的频繁发生,使得很多人开始致力于驾驶行为检测系统的研究。最初从医学角度出发,例如脑电、皮电、心电[1]、脉搏等,日本丰田公司设计了一块手表似的装置,通过检测驾驶人的脉搏、心率等生理信号来达到检测驾驶人的驾驶状态[2],从人的形态变化出发,在出现一些异常驾驶行为时会表现出和正常时不一样的形态,比如疲劳驾驶导致的眼睛闭合频率加大[3]和视野方向[4],嘴巴打开角度偏大[5],手部动作[6],到后来应用光学、化学、物理、机械和电子学等实质性的检测[7]。然而,上述的这些研究都是以驾驶人为出发点,针对单一的不良驾驶行为进行的。吉林大学吴岩研究了一种基于握力特征量的驾驶员异常行为测控系统,驾驶人通过U盘把正常驾驶握力特征载入系统,通过方向盘上的传感器实时感应来的数据与正常值作对比[2]。这种方法综合检测了驾驶人的状态,但是存在两个问题,一是在存储正常值时驾驶人的状态不确定,导致所谓的正常值不正常;二是无法检测驾驶人的一些不良习惯,如加减速不稳,爱急刹车、急转弯等。基于此,以车辆为出发点,通过检测车辆行驶过程中速度、加速度、角度等姿态数据来判断驾驶人驾驶行为,不仅不影响驾驶人驾驶,还能从数据中分析出驾驶人是否符合驾驶要求,为公交公司、出租车公司,以及一些运营车辆的公司提供了司机测评依据,从根本上预防了交通事故的发生。文中设计了一种车辆姿态的数据采集系统,可以为相关数据分析机构提供比较准确的原始大数据,而且利用捷联惯导和GPS形成的组合导航系统对车辆准确定位。
1 硬件设计
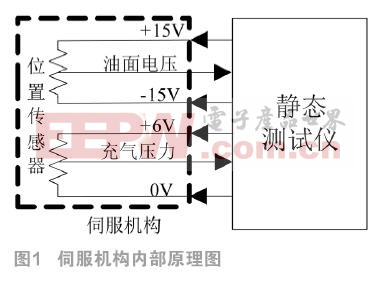
系统由数据采集终端、无线数据传输和接收数据服务器三部分组成。以ST公司推出的性能较强的STM32F107V作为控制器,结合惯性测量芯片MPU6050和地磁传感器形成的九轴传感器和著名瑞士U-Blox公司生产的NEO-6系列NE0-6MGPSGPS定位模块构建稳定的数据采集终端。借助终端采集的加速度值、角速度值和磁场强度,通过姿态解算算法得到姿态角信息和速度位移信息。采用内嵌TCP/IP协议的芯片SIM5360作为无线通信模块,借用移动公司的GPRS网络构建无线数据传输平台。以PC机作为服务器,接收采集终端采集和解算出的数据参数。系统整体框图如图1。

2 姿态分析及解算算法
2.1 姿态分析
在载体位置和运动规律的描述中,选取参考基准的坐标系是极其重要的,在这里,选取东北天的地理坐标系(n系,也称导航坐标系)作为固定参考坐标系。同时,固定传感器于汽车装饰台中心,以此为原点,按传感器方向建立动坐标系(b系,也称载体坐标系)。随着汽车的运动,载体坐标系会跟着变化,用载体坐标系相对于地理坐标系的变化角来描述汽车姿态变化,按载体坐标系绕X、Y、Z三轴转动依次称为俯仰角θ、翻滚角γ、偏航角![]() ,如图2所示。
,如图2所示。

2.2 基于四元数的姿态解算算法
通常用欧拉角法、方向余弦法、等效旋转矢量法、四元数法、对偶四元数法四种方法来描述姿态变化。欧拉角法的方程奇异现象和三角函数计算问题,方向余弦法的多个微分方程,等效旋转矢量法的计算量,对偶四元数的不成熟[8-10],使得计算量小、无几点误差、相对成熟的四元数法成为本系统的姿态解算算法首选。
2.2.1 四元数姿态解算原理
四元数表示方法如下[11]:

其中,wx、wy、wz是陀螺仪输出的数据。
根据二阶龙格库塔法有[9]:
 (7)
(7)
其中,T是姿态变换的时间间隔。根据初始化四元素值[6],结合二阶龙格库塔法求得任一时刻的四元素值,进而得到姿态角。
2.2.2 数据采集系统的误差补偿
根据四元数姿态解算原理,姿态角的求解只要陀螺仪输出的角速度,然而,只用陀螺仪得到的姿态角误差很大,包括传感器自身的测量误差、陀螺仪抗振能力弱带来的误差、交叉耦合带来的误差,以及它的漂移误差和随机误差等。在文献[11]中介绍了用加速度计和磁力感应组合采用欧拉角方式求得姿态角,同样由于加速度干扰和磁干扰使得此组合得到的姿态角存在很大误差。综上,文中采用三种传感器结合形成的九轴传感器进行数据采集,选用互补滤波法将加速度计和磁力传感器得到的姿态数据和用陀螺仪得到的姿态数据的差作为陀螺仪输出角速度的误差补偿,然后利用四元数法得到误差小的姿态数据。
互补滤波的表达式如下[11]:

2.3 基于卡尔曼滤波的组合导航系统解算算法
根据车的姿态来判断驾驶人的行为,一定程度上会受到外界客观环境的影响,比如路况。通过定位功能判断车辆所处地段,结合地段的道路情况,很大程度上可以排除这一干扰,使得更准确地判断驾驶人行为。目前GPS全球定位系统应用比较广泛,具备省时、快速、高精度、高效率的优点,不存在累计误差,但是在一些特殊的场合和地貌,GPS信号会变弱,甚至完全失去[12]。由加速度计和陀螺仪形成的惯性导航系统是一种推算式导航系统,相对于GPS,受地貌、天气等影响较小,但是正因为推算式使得在不断积分过程中造成累积误差,随着时间的增加,漂移越大,最后使得导航信息发散失效。两者结合正好互补性地达到准确定位的效果,文中利用卡尔曼滤波法将捷联惯导和GPS进行松组合,将惯性导航与GPS得到的位置速度信息进行差运算得到观测量,以惯性导航的误差方程作为系统方程,采用卡尔曼滤波对误差实现最优估计,对惯性导航进行数据修正[13]。





评论