TMS320C6711中心定位实时图像处理系统

地平仪是卫星姿态控制系统的关键子系统,其测量精度和可靠性直接关系到卫星姿态是否精确和稳定。在凝视或静态型地平仪中,地球被成像在红外面阵探测器上,因此地球图像的边缘可落在红外面阵探测器的光敏面内。对该图像进行中心定位处理,可提取出卫星的姿态参数,通过调整卫星滚动轴和俯仰轴方向,使固定在卫星上的红外面阵探测器视场中心正好对准地球中心,从而精确定位整个卫星系统的姿态。由于地平圈图像具有远多于通过圆锥扫描方式获得的信息,因而可获得更高的精度。本文利用TI公司的DSP芯片TMS320C6711B(简称C6711)实现了中心定位的相关算法。实验证明,该方法不仅可以满足实时性要求,还可以提高地平仪的测量精度,对提高卫星姿态的精度具有重要意义。
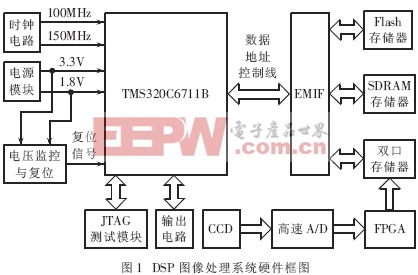
1 实时图像处理系统的硬件构成
本系统以C6711为核心,辅助以现场可编程门阵列FPGA及高速A/D等器件构成实时高速数字图像处理系统。系统硬件框图如图1。该图像处理系统的工作原理是:由CCD采集输出的模拟图像信号,经过高速A/D将模拟信号转换为数字信号。数字图像信号在FPGA控制下,将数据不断输入至双口RAM。每当一帧图像扫描结束时,FPGA提供一个中断标志信号,触发DSP进行数据搬移,将双口RAM中的一帧图像通过C6711的QDMA搬移到SDRAM中。QDMA将数据搬移完后检查图像数据是否有效,如有效则触发DSP执行图像处理程序,否则返回等下一个中断到来。DSP在下次中断到来之前处理完本帧图像,将得出的姿态角信息通过多通道缓冲串口McBSP输出给电脑PC机RS232口并显示,之后又进入中断等待状态,等待中断再次触发QDMA进行数据搬移。

相关推荐
-
-
电子阳光 | 2004-11-04
-

-
-

-

-

-
wuren_13 | 2004-11-08
-

-

-
-
-
xcxcxc1981 | 2004-07-26
-
fancy_wind | 2004-10-29
-
-

-

-

-

-
wuren_13 | 2004-11-08
评论