车用毫米波雷达传感器组网技术研究

1引言
随着人们对汽车驾驶过程当中安全性、舒适性要求的不断提高,汽车雷达被广泛的应用在汽车的自适应巡航系统,防碰撞系统以及驾驶支援系统中。其中,毫米波雷达因探测精度高、硬件体积小和不受恶劣天气影响等优点而被广泛采用。但是传统的单一雷达传感器还是存在着诸如探测范围小、可靠性低等缺点。特别是在复杂的行驶状况下,并线、移线、转弯、上下坡以及道路两旁的静态护栏、标志牌、行人都会使得雷达对主目标的识别十分困难,误报率很高。
种雷达传感器集成在一起构成的一个网络系统综合了各种传感器的优势,实现了信息分析、综合和平衡,利用数据间的冗余性和互补特性进行容错处理,克服了单一传感器可靠性低、有效探测范围小等缺点,有效地降低了雷达的误报率。由此构成的新的、高精度的传感器网络,能够极大地改善汽车雷达网络系统的性能[1].
2雷达网络的构成原理
图1所示的雷达网络由四个等距离分布在安全杠上的近距离毫米波雷达传感器(Near distance sensor,NDS)构成,每个雷达传感器均采用FMCW体制。该传感器网络可在35米的范围内实现水平方位角为120°的覆盖面。这种近距离、大覆盖面的雷达传感器网络可以在车速不高,路面状况比较复杂的情况下(例如市内交通),监控汽车前向较大范围内的目标。如果需要远距离探测,可以在安全杠中间增加一个远距离雷达传感器。随着77 GHz汽车雷达传感器技术的成熟,近/远距离雷达传感器都倾向于采用77 GHz MMIC(毫米波集成电路)技术实现,采用这种技术容易做出一体化的设计方案,使收发模块的成本大为降低。
在图2所示传感器网络系统框图中[2],基于77GHz MMIC技术的雷达传感器是构成汽车雷达网络的前端关键硬件,后端的信息处理需要用数字信号处理器等高速运算单元来完成。传感器、数字信号处理单元以及数据融合决策系统之间采用以太网、高速串行连接的方式传送数据,以满足高数据率的传输要求。数据融合系统采用分布式体系结构,即每个近距离传感器对获得的回波信号先进行局部处理,然后送入融合中心进行融合以获得目标的方位、速度信息。控制器是整个雷达网络系统的最终决策机构,它负责识别目标的距离和速度信息是否对行车安全构成威胁,并通过声光的形式提示驾驶员或者直接作用于车载控制系统加以调整。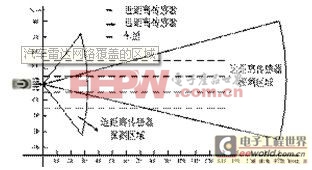
图1汽车雷达网络覆盖的区域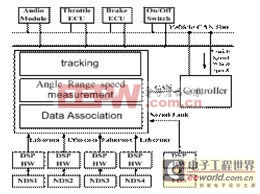
图2 雷达网络系统结构图
2 汽车雷达网络关键技术解决方案
与单个雷达传感器相比,多传感器组网的优势在于测量精度高,误报率低以及多目标识别的优越性能。测量精度高、误报率低源于数据融合技术,这就要求每个传感器在时间、频率上精确同步;多目标识别取决于系统自身对目标的识别分类能力。因此,在整个雷达网络包括每个雷达传感器的设计上都要围绕着这两点来进行。
2.1 近距离传感器设计
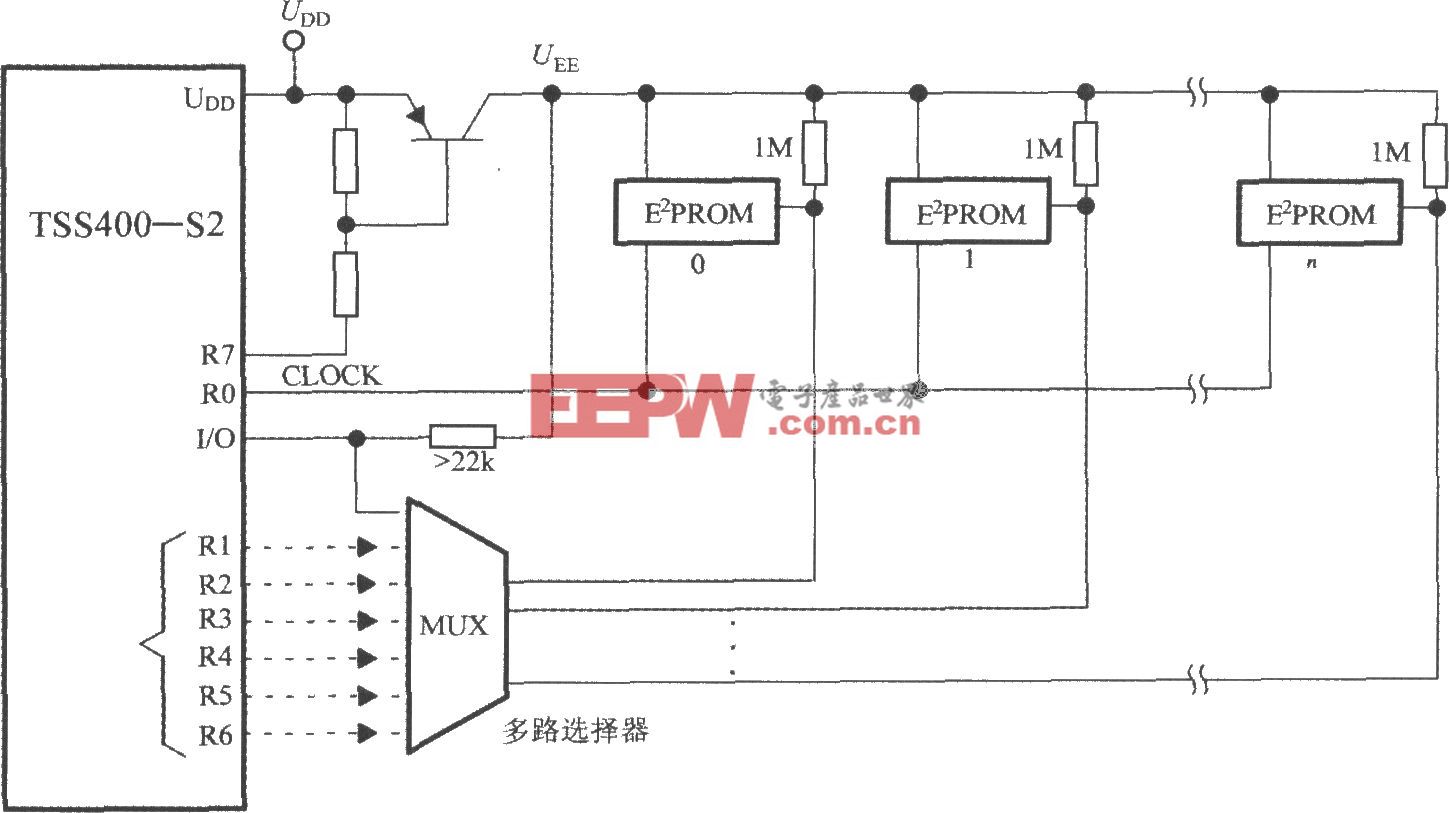
近距离雷达传感器主要担负着汽车前向35米内的目标探测,是汽车雷达网络在复杂路况下发挥效能关键部分。近距离雷达传感器主要包括射频单元、接收机和各个传感器的之间的精确时间同步控制[2]。在天线的设计上,既要符合所示的波束宽度的要求,同时又不能增大传感器的体积。因此可以采用印刷体线性阵列天线。接收机主要由一些低频元件、抗混叠滤波器和模数转换装置构成。这些低频元件所产生的噪声可以淹没微弱的回波信号,是影响探测距离的主要因素之一,因此要尽可能的降低噪声参数。此外,模数转换的采样频率应该依据近距离传感器的性能参数来确定[2]。近距离传感器的原理图如图3所示。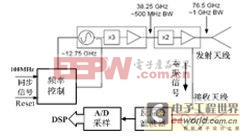
图3近距离传感器结构图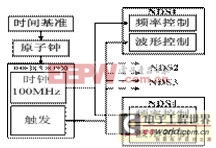
图4 同步系统框图



评论