利用实时速度检测实现渐进式再生制动

option explicit
dim RPMat50pct as integer '平台测试中在50%功率电平点测得的转速
dim CommandStrenghtPct as integer '想要达到的加速和制动强度
dim MeasuredSpeed as integer '测量得到的MeasuredSpeed
dim NeutralPower as integer '计算得出的功率电平,此时电机既不加速也不减速
dim AppliedPower as integer '将要施加于电机上的功率
dim ThrottleCommand as integer '用户命令
'修改这些常数以满足你的要求
RPMat50pct = 6000 '在50%功率电平和无负载情况下测得的转速
CommandStrenghtPct = 50 '以百分数表示的油门和刹车强度
top:
'从控制器读到的工作值
ThrottleCommand = getvalue(_CIA, 1) '从1号模拟操纵杆读取用户命令
'根据电机类型和传感器对以下两行做出反注释
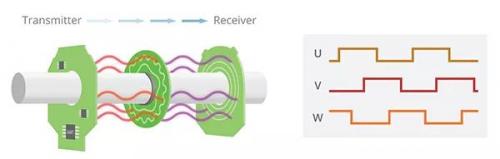
MeasuredSpeed = getvalue(_BS, 1) '使用霍尔传感器测量当前速度
'MeasuredSpeed = getvalue(_S, 1) '使用编码器测量当前速度
'计算维持当前速度所需的功率电平
NeutralPower = (MeasuredSpeed * 500) / RPMat50pct
'增加功率进行加速,或撤除功率进行减速
AppliedPower = NeutralPower + ((ThrottleCommand * CommandStrenghtPct) / 100)
'只允许正向命令,并且最大值为+1000
if (AppliedPower 1000)
AppliedPower = 1000
end if
setcommand(_G, 1, AppliedPower) '给电机施加功率
'在控制台上打印的用于监视或调试的可选记录
print("C= ", ThrottleCommand,"tS= ",MeasuredSpeed,"tN= ", NeutralPower,"tP= ", AppliedPower,"")
wait(10) '等待10ms
goto top '不断重复循环
配置、测试和改进脚本
为了使用这个脚本,首先必须测量由控制器在50%功率电平时报告的转速。然后在脚本顶部输入作为常数的这个值。接着保持命令操纵杆置中以及脚本运行,电机将保持空闲状态。手工旋转电机轴将产生施加于电机的功率,并且在前进方向上几乎没有阻力。
然后应用前进方向的操纵杆命令,电机将加速。当操纵杆处于反方向时电机将制动。对于给定操纵杆位置,加速和制动的数量可以通过改变脚本中的另外一个常数进行调整。
脚本假设电池提供稳定的电压,因此给定的功率电平总是导致相同的等效输出电压。例如电池电压为24V时,50% RPM将在电机上呈现12V电压。如果预料到电池电压波动会很严重,那么应该修改脚本将电池的当前电压考虑进去。例如,当电池电压为18V而不是24V时如果仍想在电机上有12V电压,那么功率电平必须调整为75%而不是50%.
上述脚本还可以方便地修改成使用独立的油门和刹车踏板,方法是捕获两个模拟输入,根据每个踏板压下的力量大小计算得出结果命令,并且使刹车优先于油门。制动强度也可以做到高于或低于加速的强度。
然后当需要很强的制动时,可以通过修改脚本激活与控制器数字输出之一连接的机电式刹车。
较之其它受控再生制动技术的好处
实际上,使用测量到的电机实际速度来计算BEMF的这种技术所导致的驱动特征类似于扭矩模式驱动,即控制器尝试以恒定电流馈送电机。
与扭矩模式相比,本文介绍的方法更加精确,因为测量转速通常比测量电机电流更简单更精确。包括Roboteq产品在内的大多数电机控制器测量电池电流,而实际上这是在扭矩模式下必须调节的电机电流。实际电机电流接近于测量到的电机电流,但在低功率电平时很不精确。当功率电平为0时电机电流无法测量。
另外,在扭矩模式下,控制器需要使用调节器(通常是比例-积分-微分控制器(PID))连续调整功率电平才能将被测电流调节到理想的值。PID需要调整,而在交通运输应用中电机负载变化非常强烈,这使得PID调整并不容易。控制环路连续“猜测”的速度或精度都没有从测得的转速立即计算出电机BEMF高。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理



评论