利用实时速度检测实现渐进式再生制动

当电机在汽车传动应用中使用时,最令人感兴趣的特性之一是它们还能用作发电机,因而在刹车时可以给汽车电池充电。Roboteq公司的电机控制器可以通过方便地编程充分利用这个特性以受控和渐进的方式实现再生制动。
本文讨论了使用电机速度检测这种简单且非常高效的技术背后的原理,并介绍了使用与Roboteq控制器连接的无刷电机的一个实际例子。
既是电动机又是发电机
电机的简化模型是一个电阻串联一个电感和一个电压发生器。电阻和电感就是电机内部电磁部件的电阻和电感。电压发生器代表电机在转动时由电机本身产生的电压,一般称为反向电动势,简写为BEMF.BEMF电压是一个固定的电压转速比值(V/RPM)。

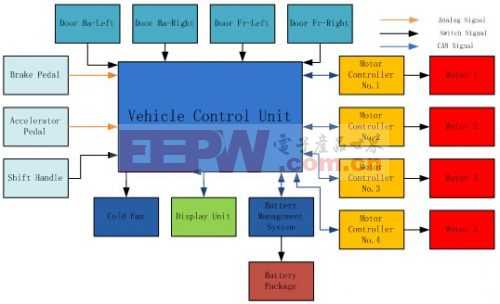
能够使用Roboteq无刷电机控制器实现渐进式再生制动的实验性电动踏板车。
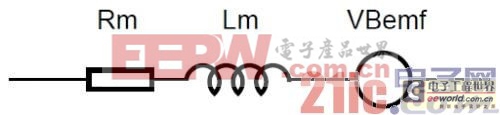
图1:电动机模型。
当给处于机械锁定状态的电机加电时,模型实际上可以简化为一个两端连接电池的电阻,测得的电流值为I=VBat/Rm.电感只是影响电压加上瞬间的电流,如果电压保持恒定这种影响会消失。
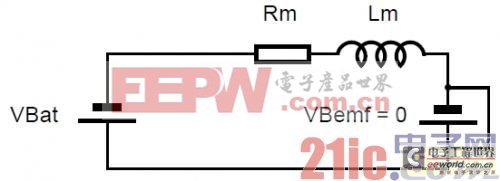
图2:当电机停转时的等效电路。
如果电机允许旋转,那么它将产生正比于旋转速度的BEMF电压。此时的模型是一个电阻加上分别位于电阻两端的发电器。电阻上的最终电压等于电池电压减去BEMF,电流则为I = (VBat - VBemf) / Rm.在实际应用中,这意味着随着电机转速的提高,电流会减小。
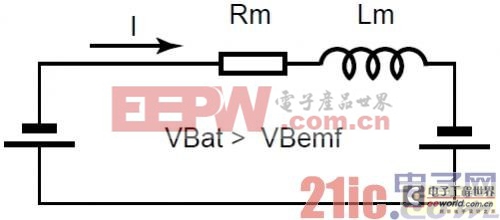
图3:加速状态。
如果电机转速可以足够快到BEMF等于电池电压,两个电压源将相互抵消,电阻上的等效电压为0,此时电池将没有电流流出。在实际应用中这种情况是不会发生的,因为这意味着电机没有一点扭矩,而克服摩擦力总是需要一定的扭矩。

图4:无负载或摩擦力时的稳定速度。
在实际应用中,当BEMF达到产生扭矩的电池电流足以克服摩擦力和电机机械负载时电机速度将趋于稳定。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理



评论