利用实时速度检测实现渐进式再生制动
然而,如果电机被外力驱动(例如汽车下坡),旋转会导致实际的BEMF等于VBat,此时不会有一点电流流动。如果此时电机以更快速度旋转,BEMF会变得大于电池电压,我们将看到电流从电机流向电池,这时系统就处于重新发电(再生)状态。
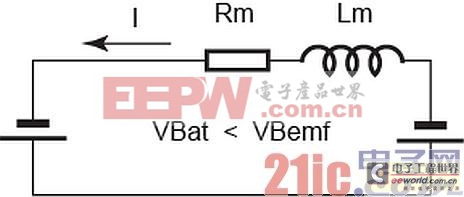
图5:再生制动状态。
PWM开关型电压源效应
目前为止我们假设是用一个固定电压电池直接连到电机上,从中我们可以看出,在恒定负载情况下,可以通过改变电池电压来控制速度。
在现代控制器中,改变电压是通过使用呈半桥(单向)或全桥(双向)结构的功率MOSFET晶体管并以近20kHz的很快速度开关电机电源来实现的。这种桥有一个底部的MOSFET和一个顶部的开关,它们以互补的方式(底部导通时顶部断开,底部断开时顶部导通)正常工作。
当与电机的电感结合在一起时,这种开关会使得控制器行为就像一个数值正比于开关导通/断开占空比的可调电压源。例如,当一半时间导通一半时间断开时,电路等效于一半电池电压的发电机。
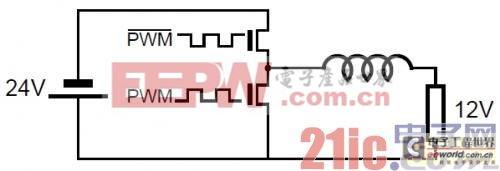
图6:50% PWM的步降转换。
这个效应在相反方向也成立。如果没有连接电池,同时电机又被驱动产生电压,那么PWM开关和电机电感在50% PWM时将作为升压器使电压翻倍。这种升压效应很好地解释了为何电机转速很慢而BEMF又小于电池电压时再生现象是如何发生的。

图7:50% PWM时的步升转换。
控制再生制动的数量
我们已经知道,由于BEMF的原因,对任何供电电压来说电机总有一个转速使它不吸取一点电流。BEMF/RPM比值是一个常数,有时在电机数据手册中会找到。通过以已知速度旋转空载电机并在其引线处测量电压也可以很容易得到这个比值。
然后,在电机速度可以测量的前提下,控制器就可以计算电机产生的BEMF并完成以下任意事项:
●匹配电机的BEMF,在这种情况下电机既不加速也不制动。如果原来处于停止状态就仍保持停止。如果已经在转动,它将保持这个速度。
●超过电机的BEMF,此时电机将加速旋转。
●低于电机的BEMF,此时电机将制动并再生电流。
电机BEMF和控制器输出电压之差越大,再生和制动也越强。
假设电池电压保持得相当稳定,那么还可以通过计算控制器的PWM输出功率电平与该电平下的速度比值进一步简化上述理论。
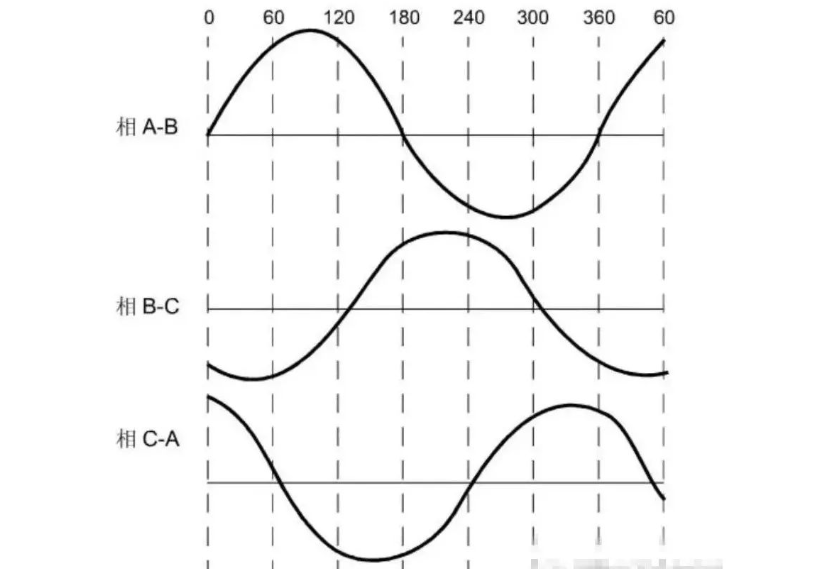
使用调速PWM的实际例子
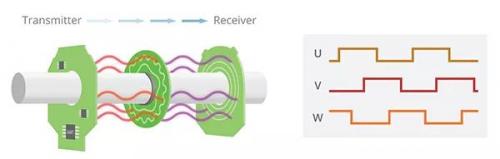
Roboteq电机控制器能够检测电机的旋转速度。对无刷电机来说,不需要任何额外硬件,通过监视电机的霍尔传感器的变化就能实现。对有刷直流电机来说,可以使用安装在电机轴上的光学编码器来测速。施加50%的功率并记录无负载电机的转速可以让我们了解功率电平多大才能接近电机的BEMF。

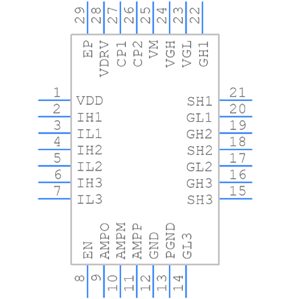
图8:Roboteq电机控制器的电机连接。
我们可以利用控制器的Microbasic脚本描述语言轻松地写出这样的脚本,它能用来测量电机的当前速度,并计算用于加速、制动或保持当前速度所必须输出的功率电平。
举例来说,考虑在50% PWM时进行测量的汽车情况,当车轮不接触地面时电机以2500RPM速度旋转。
现在如果汽车处在一个斜坡上,电机转速为2500 RPM,控制器将测量这个转速,然后施加50%的功率,因此实际上电机不消耗电流(在这个速度下电流将是无负载电流)。这是因为在斜坡上时将使电机以2500转速自然运行,此时的机电状态与车轮不接触地面时完全一样。
现在,如果在电机转速已经是2500 RPM时我们施加超过50%的功率,这将给予额外的功率,电机将以更快速度运行。
如果在2500 RPM时我们施加小于50%的功率,那将发生再生制动。控制器输出功率低于50%越多,制动效果越明显。
因此这种技术可以让控制器测量速度、计算要施加的输出功率以便在这个RPM条件下实现加速或制动。然后使用油门命令提高或降低功率值来进行加速或制动。
下面的脚本是实现受控再生所需的完整清单。它使用一条用户命令进行加速和制动。这个脚本只能以前进方向操作电机。

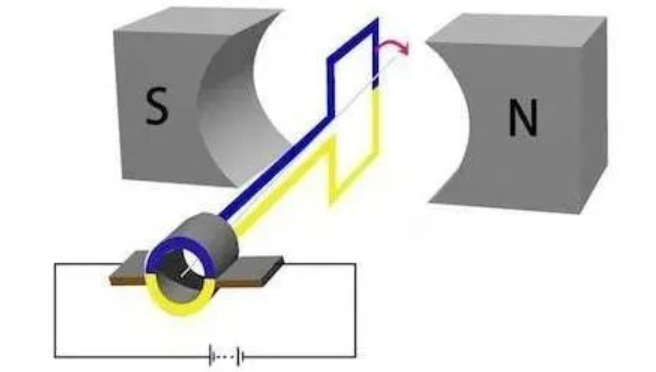
霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理




评论