基于FPGA/MCU结构的线性调频高度表设计

1 引言
无线电高度表不仅可以精确测量飞行器与地面或海面的相对高度,而且还可以测量地表 粗糙度、海洋波浪高度等多种参数,在飞机的自动着陆、自动导航、地形匹配等领域得到了 广泛的应用。无线电高度表主要分为调频连续波体制和脉冲体制两种,调频连续波体制适合 1500m 以内的低高度应用,脉冲体制适合1500m 以上的中高高度应用。本文介绍了一种基于 FPGA/MCU 结构的线性调频(LFMCW)连续波高度表,具有精度高,结构简单,可靠性高,成 本低等特点。
2 工作原理
线性调频连续波高度表的基本原理为[2]:采用三角波线性调频微波振荡源,经发射天线 辐射等幅调频波,经过与飞行器飞行高度成正比例的时间延迟τ,由地面发射并被接收天线接 收,经混频后输出差拍信号fb,该信号经窄带滤波器选频后,被一个增益随高度变化的放大 器放大、滤波,送到跟踪鉴频器。跟踪鉴频器输出高、低电平表示差拍信号是否进入跟踪带 内,控制单元根据保持或调整三角波的斜率,使差拍信号始终落入跟踪带内,保持恒定值。 整个系统通过地面构成闭环,飞行器的高度由三角波的斜率和最大频偏Δf 来决定。
其主要性能指标为:
工作频率:C 波段
体制:LFMCW(线性调频连续波)
测高范围:0?1500m
距离分辨率:1m
高度数据接口:RS422,9600 波特率
该高度表属于收发天线分开、三角波调频、频谱前沿跟踪、恒定差拍式无线电高度表,其工作原理如图1 所示。
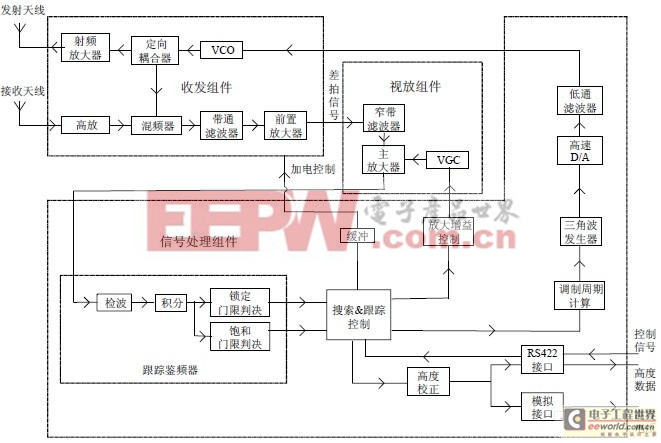
图1 线性调频高度表工作原理图 上图中,三角波发生器输出信号的幅度是一个常数,而其斜率是控制电压的函数。在测 高过程中,通过测高回路自动校正,使调制信号的斜率随高度而变化,以保持差拍恒定。变 化规律是高度升高,斜率增大;高度降低,斜率减小。跟踪鉴频器判别差拍信号fb 是否进入 跟踪带内,如是则输出锁定信号。跟踪鉴频器的中心频率为225kHz,带宽仅为30kHz 左右, 使高度表有较高的抗噪声和抗干扰的能力。在没有跟踪锁定信号时,高度表进入搜索状态, 变化三角波的斜率,从最低高度到限制的最高高度周期地扫描,并根据跟踪鉴频器是否输出 锁定信号进行调整。当调制斜率对应飞行高度时跟踪鉴频器输出高电平,高度表环路锁定并 保持跟踪地面发射的信号。
接收、发射天线选用微带集成平板天线,天线间距不小于1m,使收发隔离度大于70dB。 天线的3dB 带宽为300MHz,旁瓣电平不大于-12dB,驻波比S=2,效率η≈80,总尺寸不大于 15cm×15cm。
收发组件采用自差结构,输出为零中频的差拍信号,其频率跟地面高度成正比。VCO 的 调制带宽最高可达200MHz,调制线性度优于1.2。组件的接收增益30dB,噪声系数3.5dB。 视放组件对差拍信号进行选频放大,总增益不低于80dB,增益控制范围不低于90dB。
选频滤波器为定制的机械滤波器,中心频率225kHz,带宽30kHz。主放大器选用AD 公司的视 频放大器AD*,它内部集成了两个放大器模块,可以单独使用其中的任何一个或将两个级 联使用以提高增益和扩大动态范围,每个放大器模块的增益最大可达54.4dB,增益控制范围 48.4dB。







评论