基于Matlab/Simulink的滑模软起动器仿真研究

摘要:随着电动机的广泛使用,对电机起动的要求越来越高,对软起动装置也使用越来越多。滑模软起动器几种软起动方式的改变主要是通过对触发脉冲导通角(alpha)不同计算方法实现的,不需要对软起动装置的硬件作大的改变,也不会增加硬件成本。提出了一种滑模软起动装置,构建了斜坡起动、限流起动、转矩控制起动和分级变频起动四种软起动模型。通过滑模控制,使软起动装置能够满足在不同工作场合下电动机的起动要求,进而扩大软起动装置的使用范围。在Matlab/Simulink环境下对该软起动控制装置进行建模仿真。
关键词:滑模;软起动器;Simulink;斜坡起动;限流起动;转矩控制起动;分级变频起动
0 引言
不同的电机软起动方式具有各异的特性。斜坡起动、限流起动解决电机起动过程产生的过大冲击电流,这种起动方式适合于轻载电机起动;转矩控制起动、分级变频起动可以解决使用降压起动带来的起动转矩过小的问题,适用于重载的电机起动。构建适应不同工作场合需
要的电动机滑模软起动控制器具有工程应用价值。滑模软起动装置集斜坡起动、限流起动、转矩控制起动、分级变频起动等方式于一体,通过改变对交流模块输入的晶闸管导通脉冲选择电动机的软起动方式,进而扩大软起动装置的使用范围。本文在Matlab/Simulink环境下对滑模软起动进行了建模仿真研究。
1 软起动器的控制系统结构
1.1 仿真系统建模
在Mafiab/Simulink环境中,建立一个软起动器的模型,其综合了斜坡软起动、限流软起动、转矩控制软起动及分级变频软起动这几种软起动方式。并且使该软启动器实现能够让用户根据需要,选择一种适合用于电机软起动的方式进行起动。图1是基于Simulink的系统仿真框图。在仿真系统中,主要包括了滑模软起动控制、交流调压、电机和电气测量模块等单元。
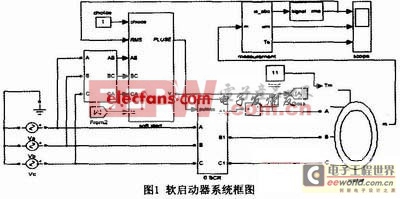
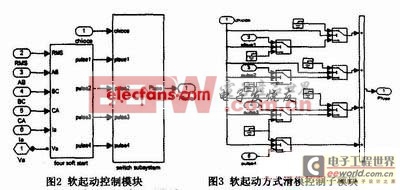
滑模软起动控制模块是由4个软起动子模块(four soft start)和软起动方式滑模选择模块(switch subsystem)组成。输入量有电机定子电流单相有效值RMS、电机A相输入的电压值Va与电流值Ia和同步电压。
1.2 触发脉冲子模块
在整个系统中的晶闸管的触发脉冲主要使用6脉冲发生器模块来产生,并且能够对6脉冲进行延迟,生成一组可控的6相脉冲波。产生的6相脉冲在4个软起动方式中都有使用。其中图4是六脉冲发生器的子系统。
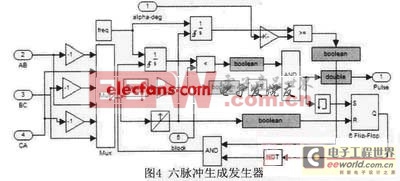
在6脉冲发生器模块中,有两个常量“Pwidth”和“freq”,“Pwidth”的值为6相触发脉冲的宽度;“freq”为同步电压频率;从“alpha deg”输入端输入触发角的值,可以是一组连续变量,通过对“alpha_deg”的值生成一组可控的晶闸管导通的6相脉冲;“block”是6脉冲发生器的锁存端,输入端为零时,模块正常工作产生一组6相脉冲;当输入端为高电平时,启动截止保护,这时脉冲将不再产生,晶闸管也就不能导通。
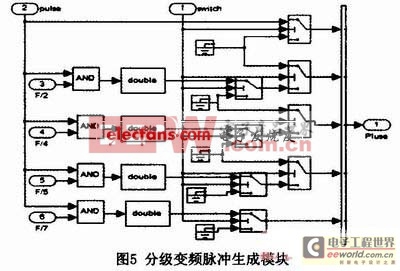
但是在6脉冲生成器模块中,其脉冲生成是根据电源的同步电压进行计算,子系统中的频率设置和同步电压的频率是保持一致的,生成的6相脉冲频率不可改变。在分级变频软起动模块中,晶闸管的6相导由6相脉冲发生器产生的一组基频的脉冲波和一组低频的脉冲进行与运算生成,这组脉冲是以低频脉冲的频率做为频率,以基波脉宽作为脉冲宽度,并且可以通过“alpha deg”对脉冲进行延迟。这样生成一组低频的导通角可控的低频脉冲,满足分级变频软起动的脉冲要求。在图5分级变频脉冲合成模块中,频率分别为F/2、F/4、F/5、F/7的方波脉冲和6脉冲发生器产生的脉冲进行与运算,生成F/2、F/4、F/5、F/7频率方波,并根据输入的时间选择各个分级频率运行时间,完成分级变频软起动控制。
2 软起动控制方式
在软起动的仿真系统中,软起动模块中有四种软起动方式的子模块,分别是斜坡软起动、限流软起动、分级变频软起动和转矩控制软起动子模块。四种软起动是通过对晶闸管的导通角(alpha)不同计算方法,产生相适应的四种软起动方式的六脉冲,达到各自的软起动的目的。
2.1 斜坡软起动

斜坡式软起动是从初始角开始以斜坡的方式增加电动机上的电压直到额定电压的软起动方式。斜坡软起动的初始角可以根据情况进行设置,起动时间也可以由用户调节。图6是斜坡软启动alpha角计算的子模块。“uini”是软起动的初始角,“uincr”是软起动的斜坡增长的斜率控制。
斜坡电压软起动是一种常见软起动方式,这种起动方式的起动时间比直接起动长,起动电流比直接起动小,起动转矩不高,容易实现。
2.2 限流起动
限流起动是在电动机的起动过程中限制其起动电流不超过某一设定值。这种起动方法主要用在轻载起动的降压起动,其输出电压从零开始迅速增长,直到其输出电流达到预先设定的电流限制,然后在保持输出电流小于电流设定值的条件下逐渐升高电压,直到额定电压,从而使电动机转速逐渐升高,直到额定转速。图7是基于Matlab/Simulink搭建的限流软启动alpha计算子模块,alpha计算是在电流的闭环控制使用模糊控制器计算alpha角,调节电机两端电压。

限流软起动采用电流反馈的闭环模糊控制调节,可以快速、准确地触发晶闸管,避免大电流的冲击,很好地限制起动电流。
linux操作系统文章专题:linux操作系统详解(linux不再难懂)









评论