基于HC9SDGl28单片机的智能车的设计

0 引言
轮式小车是智能小车机械结构的主体部分,由车身、轮子、速度传感器、转动轴等结构部件构成。还包括提供动力的驱动器,采集环境信息的摄像头等模块,综合实现收集小车的自身状态信息或外部环境信息,并对传感器的数据进行分析、融合,动态调整小车的运动状态,实现在一定条件下的自主寻迹行驶。
本智能车采用PID控制算法,使用CCD线型摄像头作为黑色引导线的检测设备,经LM393比较后供单片机进行数据采集,图像识别,从而可以进行路径识别。电机驱动采用的是PC33886,使用直射型光电传感器来测量速度,并将相关信息显示在LCD液晶显示屏上,并采用4个按钮按键进行参数设定,为现场调试提供了友好的人机交互界面。
1 系统框架设计
整个车模系统可以分为三大部分:环境图像采集部分、电机和舵机驱动部分、中央数据处理部分,且采用16位微控器MC9S12DGl28B作为核心控制单元,系统框图如图1所示。
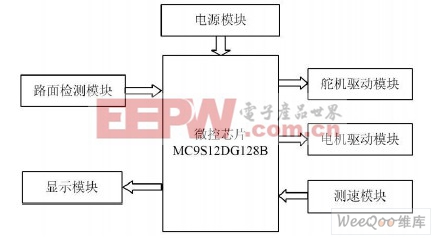
图1 系统框图
智能车的动力部分使用的是常见的小型永磁式直流电机。这种电动机的驱动电路非常成熟,既有分离元件组成的驱动器,也有一体化的功率集成驱动芯片可供选用。
智能汽车最重要的部件,也就是智能汽车的大脑——中央处理系统。它不仅负责将环境图像采集部分送来的图像数据进行处理,还要将这些信息转化成为电机的驱动控制信号,使整车按照预定的规则前行,这就要求该系统具有庞大的数据处理能力。
2 路面检测模块
2.1 路面检测方案比较及可行性分析
环境图像采集部分可以采用阵列红外探头和CCD或CMOS图像传感器来实现,前者的特点是价格低廉、电路简单、应用方便,缺点是性能有限,对复杂环境的适应能力较弱,效果较差。而CCD或COMS图像传感器(摄像头)就能弥补阵列红外探头的各种缺点。
为了能快速采集图像数据并且兼顾开发的难易程度,在此次设计中将采用输出标准TV视频信号的黑白监控摄像头。这种摄像头可以配合行、场同步信号分离电路和单片机自身的A/D转换电路,可以将图像方便地采集进来,从而回避数字型摄像头复杂的总线协议和数据处理过程。
2.2 硬件设计
LM1881视频同步信号分离芯片可以从摄像头信号中提取信号的时序信息,LM1881的同步分离电路如图2所示。
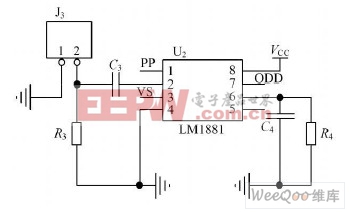
图2 LM1881 同步分离电路图
引脚2为视频信号输入端,摄像头信号即由此输入LM1881,引脚3为场同步信号输出端,当摄像头信号的场同步脉冲到来时,该端将变为低电平,一般维持 230μs,然后重新变回高电平,引脚7为奇一偶场同步信号输出端,当摄像头信号处于奇场时,该端为高电平,当处于偶场时,为低电平。奇一偶场的交替处与场同步信号的下降沿同步,也就是和场同步脉冲后的上升沿同步。
3 速度传感器
3.1 方案选择
(1)霍尔传感器配合稀土磁钢
优点:获取信息准确、体积小、不增加后轮负载。
缺点:齿轮出靠近主驱动电机,容易受磁场干扰,对齿轮打孔容易顺坏齿轮。
(2)光电传感器
优点:体积小、不增加后轮负载、反射型方案对原有器件不需要再加工。
缺点:精度受到光电管体积的限制。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理










评论