车载通信正在面临变革

车载网络正开始从域架构向区域架构迁移,这种方法将使用更少的协议、更少的布线,从而简化和加速车辆中的通信,并最终降低成本。
本文引用地址:https://www.eepw.com.cn/article/202312/454235.htm区域架构将车辆划分为更易于管理和灵活的区域,但实现这一目标需要时间。当今的汽车中有太多的传统技术,汽车制造商必须支持一系列协议。例如,车辆可能支持蓝牙、USB、LTE 支持信息娱乐的移动设备,以及一些内部开发的协议。对于摄像机来说,MIPI 是主要的协议。对于 ADAS、ECU 和传感器融合的实时控制,它们可能会支持控制器局域网 (CANs)、本地互连网络 (LINs)、以太网等。
实现这一转变的关键要素之一是更快的通信。几年前,93% 的汽车网络运行速度低于 100Mbps,而且其中大部分不太可能在一夜之间改变。事实上,10/100/1000BASE-T1 汽车以太网和低速总线(例如 CAN 及其变体)很可能将继续为大多数低速通信提供服务。但随着时间的推移,随着汽车开始根据各个区域的输入做出更重要的决策,数千兆位的速度将被添加到车辆中以实现数据的快速移动。
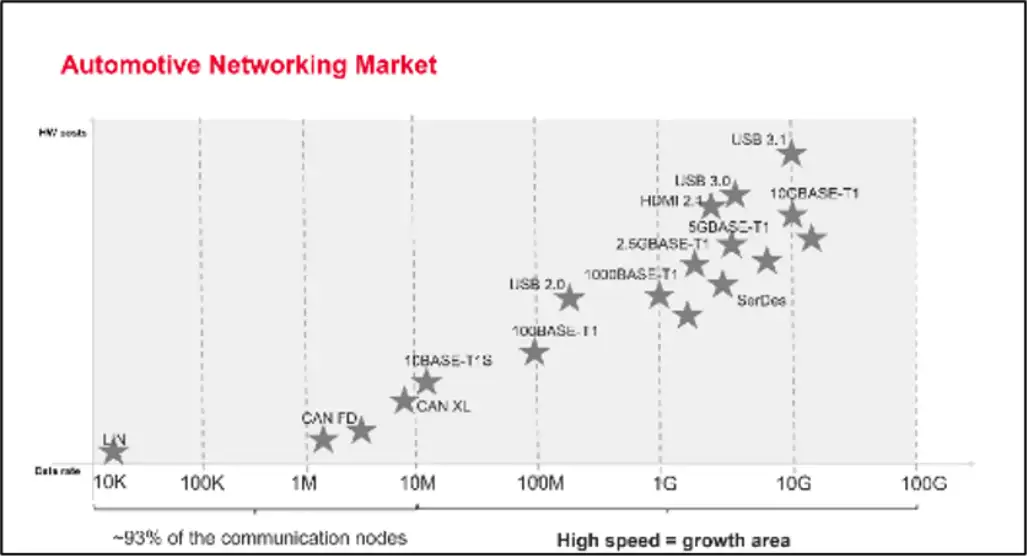
图 1:各类汽车网络技术对比。来源:Keysight
是德科技汽车以太网技术解决方案架构师兼规划师 Jae Yong 表示:「汽车行业预计,汽车以太网不会取代所有传统连接。相反,我们将继续看到不同通信协议和方法的混合。图 1 右上方的巨大星团是最具活力的,也是很多创新发生的地方。正如我们从物理学中知道的那样,更高的波特率会增加电干扰、噪声源、反射、衰减和其他影响信号和这些信号中携带的数据的损失。数据速率越快,部署前的测试就越具有挑战性和重要性。我们预计,千兆汽车以太网将推动基于 IEEE 802.3ch 和 IEEE 802.3cy 标准的高速通信需求。例如,IEEE 802.3cz 小组最近发布了新的多千兆位光学汽车以太网标准。对于汽车联网来说,这是一个有趣的时代,我们应该期待未来会有许多挑战和创新。」
其他人也同意这一观点,认为更快的通信更多地是一种进化方向,而不是一次性的转变。但这种转变的优势仍然是显著的。
西门子数字工业软件公司混合和虚拟系统副总裁 David Fritz 指出,汽车以太网可能是该领域的领导者。「带宽将很快支持 L4 和 L5 自治的所有实现。此外,CAN 帧可以通过以太网传输,允许网关管理本地 CAN 和 CAN FD 区域网络,支持现有的 ECU。汽车以太网的重量和功率方面远远优于传统的 CAN 网络。Can - FD 正逐渐成为以太网的竞争对手,至于谁将胜出,目前还没有定论。然而,我们可以看到传感器、执行器和 ECU 供应商正因为上述特性而直接支持汽车以太网。」
Cadence 汽车解决方案集团主管 Robert Schweiger 表示:「我们的目标之一是用尽可能多的标准化网络技术——协议、控制器和物理设备——来取代专有解决方案。另一个目标是减少不同网络技术的多样性以创建更加同质的网络架构。为此需要利用汽车以太网,例如 10BASE-T1、100BASE-T1、1000BASE-T1、10G BASE-T1。」
Schweiger 指出,区域架构的关键将是车载网络的整体带宽和效率的显著提高,区域架构主要依赖于汽车以太网、ASA Motion-Link/MIPI a - phy、MIPI CSI2、MIPI DSI、POF、CAN 和 LIN。「当然,这可能因 OEM 不同而有所不同,一些专有解决方案仍然存在。」
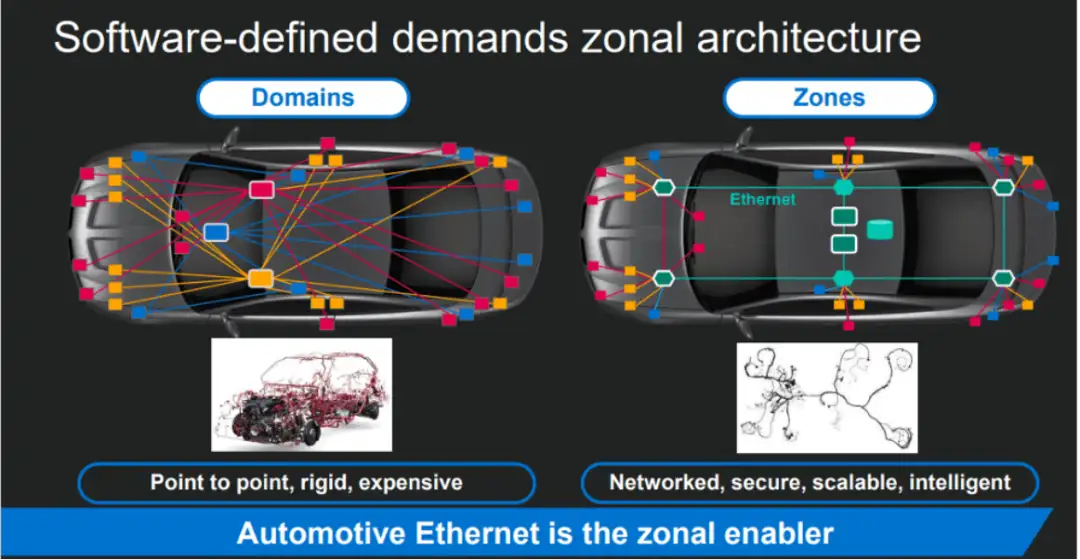
图 2:区域架构简化了传统的域方法。来源:Marvell
汽车设计不会在一夜之间发生变化。设计周期通常至少持续几年,而某些组件和子系统的设计可能会在市场上停留更长时间。因此,汽车网络格局将继续是协议和依赖于应用程序的方案的混合体。其中一些将服务于非实时应用,如信息娱乐和车内乘员行为监控。其他协议将支持安全和其他实时应用。
是德科技 Automotive SerDes Technologies 解决方案架构师和规划师 Kevin Kershner 指出:「例如,如果驾驶员离开车辆时无人照看儿童或宠物,驾驶员将收到警报。OEM 正在努力简化实时应用程序的设计,同时提高性能和通信速度,特别是在自动驾驶领域。」
此外,汽车行业的电气和电子 (E/E) 架构也在不断发展,以支持日益复杂的需求,包括基于传感器的驾驶辅助系统 (ADAS) 和自动驾驶 (AD) 应用的作用。
「车辆内部和周围有丰富的显示技术,包括高分辨率仪表板、侧视镜面板以及与消费电子设备服务相当的信息娱乐选项,」Kershner 表示,「许多传感器,包括摄像头、激光雷达和雷达,都会捕获高分辨率数据,然后将其与其他传感器数据一起传输或聚合,以供 ADAS/AD 应用程序进一步处理。」
至于环视摄像头系统,多个摄像头也可以将视频传输到车内的显示器。「在这里,应用需求推动了 E/E 的选择,包括传感器总数和传输数据所需的带宽,」他说。「这意味着通信技术的选择真正取决于应用程序。考虑到高速设备的成本、复杂性和功耗,低速功能不能使用「过度设计」的高速总线。某些技术是点对点的,而其他技术则支持多点节点的效率。部分高速链路是对称的,支持大功率计算节点之间的双向通信。相比之下,其他设计是不对称的,以支持在单一方向上需要高吞吐量的应用 (例如,相机输出下游,命令和控制上游)。
从域架构到区域架构
ECU 是车辆的基本构建块。它们控制各种功能,如发动机运行、变速箱、紧急制动,以及其他监控功能,如轮胎压力和车内气候控制。与区域架构不同,域架构将各种功能分组到域中,而不考虑这些域的物理位置。在域架构中,支持每个域的 ECU 可能分布在车辆内部。因此,可能需要较长的电缆线束来连接到这些域。
传统上,OEM 在其设计中使用域架构。域架构中使用的主要网络协议是控制器局域网 (CAN) 和本地互连网络 (LIN),这两种网络协议已被 OEM 用于执行各种功能的实时控制。CAN (ISO 11898-1:2003) 是一种支持三种不同速度的串行网络协议:
低速—500 米总线长度(最大)时为 125 Kbps
高速—40 米总线长度(最大)时为 1 Mbps
灵活的数据速率 (CAN FD)—10 米总线长度(最大)时为 15 Mbps
CAN 已被证明是可靠且成本相对较低的,可支持分布式实时控制和多路复用设备,包括 ECU。LIN (ISO 17987-2) 是 CAN 的补充,也是一种串行网络协议。它支持 19.2 Kbit/s 的较低数据速度,通常用于舱内灯光控制,如调光。
随着汽车行业整合更多的软件和电子设备来支持软件定义车辆和自动驾驶,对高速通信的需求也在增加。虽然意见不一,但一些专家认为,未来的自动驾驶将需要 50Gbps 的数据传输速度,以支持各种实时 ADAS 和 ECU 功能。根据以太网联盟的说法,目前以太网的传输速度为 100Gbps,在未来几年内有可能达到每秒 tera 比特。
随着新技术和新功能的发展,这种情况可能会发生变化。近年来,汽车网络已经从基于域的架构发展到基于汽车以太网的区域架构。
Marvell 汽车营销副总裁 Amir Bar-Niv 表示,电动汽车内电缆线束的总重量仅次于汽车发动机和底盘的重量。减少电缆的长度和数量可以减少车辆的总重量,提高燃油效率 (或电动汽车的续航里程),并简化制造过程。
同时也在努力简化通信。目前,单个网络必须支持一定范围的带宽和各种不同的协议。例如,ADAS 将推动增加网络协议带宽的需求。
无线通信可以提供帮助,部分原因是大部分无线通信都是在汽车之外开发和完善的。「由于无线协议通常不是针对汽车的,因此它们将进一步集成,以支持消费电子设备,」Arm 汽车业务部门的汽车合作主管 Bernhard Rill 解释说。「整个行业都在努力确定如何将这些无线协议用于未来的汽车特定用例。如今,汽车使用了大量的网络,催生了一种整合通信的趋势。当涉及到 E/E 架构时,网络是一个非常重要的关注点。汽车原始设备制造商正在寻找 CAN-FD 和基于以太网的网络,如 10BASE-T1S。此外,可互操作的 2.5Gbps 骨干以太网需要在大规模生产使用时进行加固,高速连接将使用 PCIe 进行相干芯片设计。」
区域架构与域架构
使用更高速以太网的区域架构的想法正在获得发展势头,因为与域架构相比,它更简单、更容易制造。该技术方法使用多个区域开关来控制各种功能。
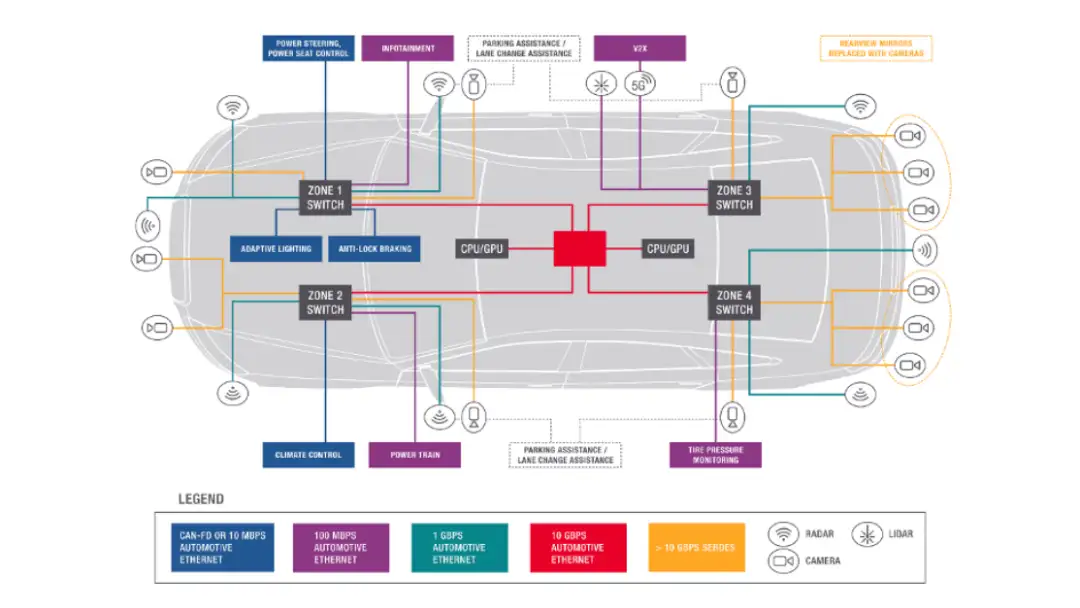
图 3:在区域架构设计中,使用多个不同速度的区域开关来控制车辆中的各种功能。来源:Keysight
位于操作系统和硬件之间的中间件栈将在区域架构中变得越来越重要,许多自动驾驶功能 (如 ADAS 和紧急制动) 都是由中间件执行的。服务质量是中间件的关键,包括优先处理任务关键、实时和时间敏感的音乐流。
Arm 的 Rill 清楚地看到,汽车 E/E 架构将朝着区域方向发展。他指出,Arm 正在积极与生态系统合作伙伴合作,以确定如何使用区域控制器,以及可以在区域控制器上托管哪些功能,包括 ADAS 和数字舱室相关的用例。「考虑到汽车行业漫长的发展周期,向区域架构的过渡将需要时间。」
遗留因素
由于 OEM 目前使用的许多遗留网络协议,使用以太网转换到区域架构可能比听起来要困难得多。在取代遗留协议后,任何新设计都需要至少与旧协议一样好。真正的挑战是在不影响新产品推出的情况下实现平稳过渡。因此,OEM 可能有不同程度的区域转型和时间表。
「大多数应用程序都有延迟和/或有效负载要求,以支持车辆的操作方面,例如实时操作,例如用于高延迟/低负载的 LIN,用于低延迟/高负载的以太网。」英飞凌科技美洲地区车辆用户体验部门高级总监 Ray Notarantonio 表示。一般来说,网络的大小可以满足这些需求,这支持每个应用程序的最佳性价比。它保证了网络在设计上既不会过度利用,也不会利用不足。
另一方面,计划转向软件定义汽车的 OEM 将选择区域架构。NXP 车载网络高级副总裁兼总经理 Meindert van den Beld 指出:「这种大规模的区域化将包括引入一个多 Gb、高度设计的以太网主干,连接更多面向安全/安全的区域模块,能够实现系统的完全隔离,共享相同的物理资源。」
因此,与采用传统设计的 OEM 相比,初创公司或新 OEM 在采用区域架构方面可能具有更大的灵活性。
瑞萨电子高性能计算、模拟和电源解决方案部门产品营销总监 Sam Gold 表示:「区域架构的引入很大程度上取决于单个 OEM 的策略。新玩家可以更自由地修改现有架构,甚至可以从头开始实现新的架构概念。另一方面,成熟的 OEM 可能面临强烈的传统依赖,并且拥有各种各样的汽车模型,具有强烈的相互依赖性。这导致只能应用网络拓扑结构或体系结构的边际或渐进变化。降低线束的成本、复杂性和重量是所有 OEM 的共同目标。在这方面,线束的自动化与手工制造也是一个很大的成本因素。」
区域安全问题
安全仍然是汽车领域的一个大问题,虽然理论上区域架构更容易监管,但在 CAN、LIN、以太网和其他技术组合的转型阶段,可能会产生新的漏洞。这意味着 OEM 需要做更多的工作来降低网络攻击的风险。
是德科技自动驾驶汽车业务线产品经理 Carrie Browen 表示:「随着汽车行业不断适应日益复杂的显示器和连接需求,复杂性已成为新常态。随着车辆内的网络变得更快、更复杂,他们需要更高水平的测试以确保功能的一致性。这不仅仅是一种奢侈,而且是确保每个界面免受网络威胁的必要条件。例如,随着汽车中通过 CAN、蓝牙、汽车以太网、SerDes、无线、蜂窝等方式的连接越来越多,信息被破坏的可能性也越来越大,并成为潜在的威胁接口。因此,在设计、验证和生产过程中,必须遵守相关法规 (ISO/SAE 21434 和 UN-R155) 并对网络本身进行验证。」
英飞凌的 Notarantonio 对此表示赞同。「网络安全多年来一直是车辆的标准配置。消息通过安全域中的硬件安全模块和专用软件进行身份验证。CAN 和 CAN-FD 网络是最先增加安全性的网络,并且自那时起安全性才不断扩大。如今,人们正在做出各种选择来保护新网络,例如车辆上的以太网,选择 MACSEC 或 IPSEC,但没有什么是不安全的。」
与此同时,随着车辆的连接越来越多,汽车网络的设计必须具有强制性的网络安全风险管理。
瑞萨电子的 Gold 表示,「OEM 应该开发纵深防御,但也要实现加密敏捷性。纵深防御应考虑对车辆外部通信 (如 TLS、外部 I/F 认证) 和内部通信 (如 IDS/IPS、TLS、MACsec、IPsec、SecOC) 的保护。车辆安全运营中心可以对上述保护机制的安全日志进行分析,并在必要时通过无线固件部署安全补丁,以减轻对车辆汽车网络的网络威胁。由于更长的密钥长度和/或密码系统被破坏,应该考虑使用 Crypt 敏捷性来支持汽车网络协议更新。后量子加密正在被考虑作为下一代算法。应该定义适当的体系结构来防止安全瓶颈 (例如,分布式安全处理)。」
OEM 的布局情况
虽然很难预测 OEM 何时会实现 100% 的以太网,但大多数 OEM 都在当前和未来的设计中使用以太网。Marvell 的 Bar-Niv 表示,在未来几年,采用率将会加快。
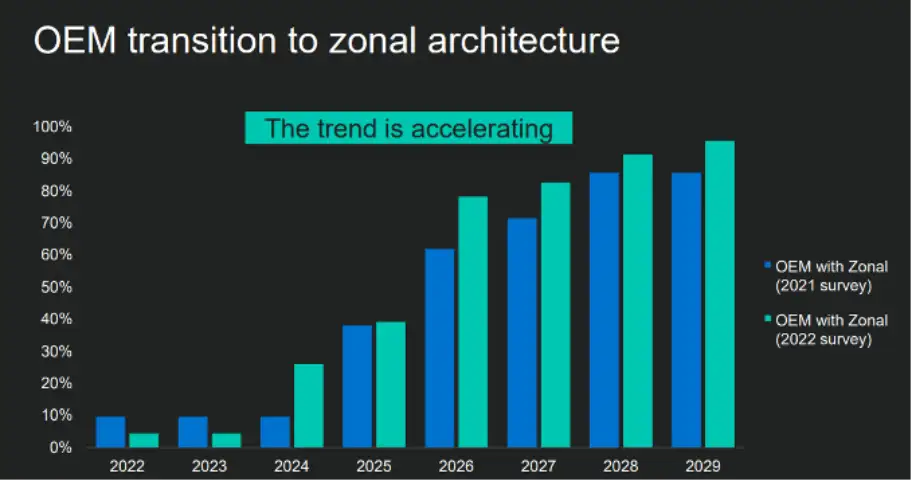
图 4:区域架构的采用预计将在未来几年内加速。来源:Marvell
宝马是最早在其车辆中采用以太网的公司之一。2021 年,它在其量产车型 BMW iX 中引入了千兆以太网。如今,以太网已用于所有生产型号。
与其他 OEM 一样,现代汽车报告称其使用 CAN 和以太网的混合模型。其 Kona 和 Santa Fe 就是使用以太网支持 OTA 的示例。梅赛德斯-奔驰采用以太网和 CAN/LIN 的结合。2013 年,其 222 款 (s 级) 车型使用 CAN 和 LIN 2.1 作为大多数控制,同时使用以太网作为信号灯。到 2020 年,梅赛德斯-奔驰的 223 款 (s 级) 车型已经使用以太网在主要领域之间进行通信。从 2024 年开始,奥迪将推出基于分散式 Premium Platform Electric 的全新 E/E 架构 (E3),该架构将使用包括高速骨干网在内的以太网技术进行扩展。
虽然大多数 OEM 都在其设计中融入了以太网,但丰田车型目前还不支持以太网。
与此同时,美国的 OEM 正在转向区域架构。英飞凌的 Notarantonio 表示,「区域方法的一部分是将高性能计算中心与制造汽车的所有功能连接起来,并通过将更多功能集成到单个区域来实现。这种集成有助于降低材料成本和线束复杂性。」
此外,这些 OEM 正在超越简单地增加一个功能或增加一个 ECU,因为这是线束和软件复杂性的主要贡献者。
日本的目标也类似。但在那里,OEM 选择了基于领域的架构来制造他们的汽车。「无论哪种情况,它们都允许在中心节点进行大部分更新,而在区域或域进行有限的更新,但软件定义车辆是减少软件和线束复杂性的未来途径,」Notarantonio 说。
未来愿景
基于 OEM 目前的做法,可以肯定的是,区域架构将继续获得动力。除了简化汽车设计之外,区域汽车架构还为供应链创造了新的机会。
是德科技自动驾驶汽车业务线解决方案支持部门 Mei Ching (Maggie) Lim 指出:「区域架构是降低汽车网络复杂性的潜在解决方案,通过将汽车电子系统组织成区域,让 OEM 简化布线和通信路径,每个区域处理特定功能,从而节省成本、提高效率和提高可靠性。主要目标是减少电缆线束的重量和复杂性,这与使用高速通信技术提高数据吞吐量的需求相矛盾。」
此外,使用内联连接器连接多个网络段,要求长距离通信通道操作,对电气性能提出了严格的要求。「这意味着新兴标准必须严格定义允许的信道损耗,测试方法必须验证性能,」Lim 说。「应用需求决定了 E/E 架构的选择。将各种传感器聚合到单个链路上以减少电缆重量和成本,从而导致更高的吞吐量要求。提高效率和可靠性以及减轻重量是重要的驱动因素。然而,区域架构是否会成为主导取决于许多因素,包括技术进步、行业采用和汽车生态系统不断发展的需求。自主性水平、连接性需求和成本考虑都是影响因素。汽车行业是动态的,汽车架构的演变将取决于持续的技术发展以及这些概念在实际应用中的成功实施。」
此外,除了 ECU、网络和 UTP/STP 布线整合之外,区域体系结构还保证了可扩展性,与分布式/基于域的体系结构相比,有助于降低总体成本。Cadence 的 Schweiger 补充说:「OTA 软件升级使 OEM 能够在车辆生命周期内提供额外的功能或服务,而区域架构将显著改善 OTA 流程。」
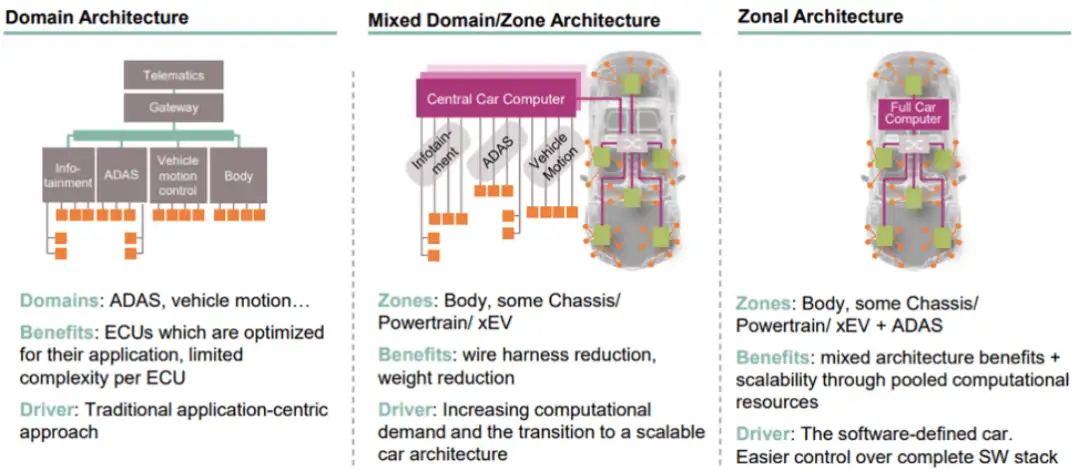
图 5:在不久的将来,域架构和区域架构将共存。来源:英飞凌
虽然区域架构被广泛认为是未来的趋势,但转型需要时间。一些 OEM 正在全速前进,而另一些 OEM 则继续支持域架构。因此,在可预见的未来,汽车设计中可能会继续使用多种网络协议。

评论