基于tanh函数的永磁同步电机无位置传感器控制研究

凤志民,杭孟荀(奇瑞新能源汽车股份有限公司,安徽 芜湖 241002)
本文引用地址:https://www.eepw.com.cn/article/202006/414836.htm摘 要:为削弱传统滑膜观测器(Sliding Mode Observer, SMO)中由于控制函数的不连续性而引起的系统抖振,设计一种基于双曲正切函数tanh的改进型SMO,采用截止频率可变的策略对转子位置角进行相位补偿并且结合锁相环估计转子位置,在同步旋转d - p 轴坐标系下建立和分析了改进型SMO,利用MATLAB/Simulink工具搭建改进SMO的仿真模型。仿真实验结果表明:改进型SMO能有效削弱系统抖振,提高了转子估计的准确性,系统的动静态特性和鲁棒性得到有效的改善。
0 引言
永磁同步电动机自身具有的高可靠性、高功率密度、高效率以及相对较小的形状体积等良好特性[1],在新能源汽车中作为电动汽车的驱动系统已得到越来越广泛的应用。然而,永磁同步电机的精准控制需要转子位置信息及转速信息的实时准确获取,传统的永磁同步电动机控制是通过旋转变压器、霍尔传感器以及光电编码器等传感器来获取电机转子和转速信息的,这些机械式的传感器安装在电机上,不仅增加了安装难度,且若在较差的工况环境下,传感器的检测精度会降低,对整个系统的稳定性和可靠性产生一定的影响[2]。随着国家对新能源汽车产业补贴支持的逐渐缩减,机械式传感器的使用也进一步增加了电驱动系统的成本。因此,对无位置传感器控制系统的研究具有一定的实用价值。
国内外学者研究了多种无位置传感器控制方法,主要包括了卡尔曼滤波器法、模型参考自适应法、高频信号注入法以及滑膜观测器等控制方法[3]。其中,对系统参数变化和干扰不敏感的滑膜观测器方法引起了学者的广泛关注。文献[4]中以滑模观测器为基本方法,提出利用非线性跟踪微分器和锁相环技术来获取反电动势和转子位置,通过仿真表明了所提方法的有效性;文献[5]在三相静止坐标系下建立了改进的滑模观测器模型,并且引入了串联低通滤波器(CLPF)及补偿环节,改善了反电动势估计信号中的高次谐波分量,使转子位置及速度的估计精度得到有效提高。
本文为削弱传统滑膜观测器中由于控制函数的不连续性而引起的系统抖振,设计了一种基于双曲正切函数tanh的改进型SMO,采用截止频率可变的策略对转子位置角进行相位补偿,并且结合锁相环估计转子位置,在同步旋转d-q轴坐标系下建立和分析了改进型SMO,利用MATLAB/Simulink工具搭建改进SMO的仿真模型,通过仿真实验对系统的可靠性以及鲁棒性进行了验证。
1 改进SMO的设计
PMSM在旋转坐标系下的定子电压公式如下:

式(1)中,  分别为定子电压、电流、磁链的d轴和q轴分量,Ld、Lq分别为d轴和q轴电感分量,R、ψ f、ωe分别为定子的电阻、永磁磁链、电角速度。
分别为定子电压、电流、磁链的d轴和q轴分量,Ld、Lq分别为d轴和q轴电感分量,R、ψ f、ωe分别为定子的电阻、永磁磁链、电角速度。
将式(1)作简单的数学变换,得到式(2):

其中Ed=0, Eq=ωeψf ,分别表示d轴和q轴感应电动势分量。
根据滑膜控制理论,SMO设计为:

其中 分别表示d轴电流观测误差,q轴观测误差,d轴电流观测值,q轴电流观测值,滑膜增益,符号函数。
分别表示d轴电流观测误差,q轴观测误差,d轴电流观测值,q轴电流观测值,滑膜增益,符号函数。
把式(2)与式(3)相减,得到电流误差状态方程,如式(4):

设滑膜面为 ,当条件 hT h.< 0满足时, h = h =.0 。将此结果带入公式(4),可得
,当条件 hT h.< 0满足时, h = h =.0 。将此结果带入公式(4),可得
为使滑模观测器有较好的估计准确性,使用双曲正切tanh(⋅)函数替代符号函数sgn (⋅)或饱和函数sat(⋅)。
函数公式如下:

传统的滑膜观测器多采用截止频率固定的低通滤波器,本文引入变截止频率策略,使截止频率随转速的变化而变化,使其滤波效果更佳。

其中,比例系数M ∈[0,1] 为常数, ωc 为截止频率。
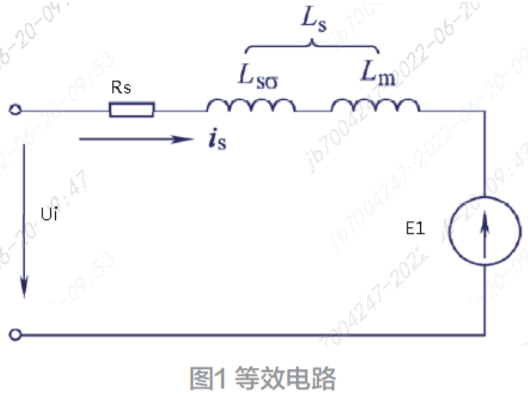
为使SMO的动态性能更加稳定可靠,引入跟踪性能较好的锁相环技术[4],可以较好地跟随转子的位置信息,锁相环原理框图如图1所示。

2 改进SMO建模与仿真分析
根据对改进SMO的理论分析,搭建改进SMO的MATLAB/Simulink仿真模型如图2所示。

在MATLAB/Simulink中将图2封装成SMO模块,并在其基础上搭建三相PMSM滑模观测器模型,如图3所示。

为了验证改进SMO 设计的性能, 将图3 建立的PMSM无位置传感器Simulink模型进行仿真分析。图3 仿真模型中的相关参数设置如下,PMSM的极对数和转动惯量以及阻尼系数分别设为pn=3, J=0.0008kg ⋅m2 , B=0,PMSM的定子d-q轴电感和电阻分别设定为Ld=1.6mH, Lg=1mH, R=0.011Ω,转子磁链ψf= 0.077Wb 。 模型仿真时的直流工作电压,系统周期以及逆变器的开关频率分别设为Udc=311 V,T=1μs, f=10kHz。
为验证改进SMO设计的动静态性能,在Simulink模型中,添加Step阶跃模块,初始速度设为1 000r/min,在0.5 s时,速度给定跳变为2 000 r/min。仿真结果如图4~图9所示。






图4与图5分别为改进SMO和传统SMO的转速估计曲线,可看出改进SMO的转速估计的波动变化以及精确性都要优于传统SMO的转速估计。图6和图7的转速估计误差对比图也表明了改进SMO的估计误差较小,性能较优。
图8和图9分别表示改进SMO的转子位置估计以及估计误差,从图8可以看出,改进SMO可有效地对转子位置进行准确估计,可以较好地跟随实际转子位置的变化,从图9可以看出,在速度为1 000 r/min时,启动时,转子估计最大误差为0.45 rad范围内,当速度在0.5 s跳变为2 000 r/min时,最大误差在0.3 rad范围内,随后在0.1 rad左右变化,验证了改进SMO的估计效果。
为验证改进SMO的抗干扰性能,给的模型输入速度为2 000 r/min,在0.5 s时加入正5 N的扰动负载,转速估计如图10所示,可以看出当模型加入5 N的负载时,转速有一定的跌落,但是在0.7 s后,转速基本稳定地跟随实际值的变化;同样地,在0.5 s时加入-5 N的扰动负载,转速估计如图11所示,在加入逆向扰动时,转速有一定的增加,但也在0.7 s后,基本可以稳定跟随实际值,验证了改进SMO系统模型具有较好的鲁棒性。


3 结语
本文为削弱传统滑膜观测器存在的抖振现象,设计了一种基于双曲正切函数tanh的改进型滑模观测器,采用截止频率可变的策略对转子位置角进行相位补偿并且结合锁相环估计转子位置,在同步旋转坐标系下搭建了改进型滑膜观测器的Simulink仿真模型,通过仿真实验对系统的动静态性能以及鲁棒性能进行了验证,结果表明:改进型SMO能有效地削弱系统抖振,提高了转子估计的准确性,且系统的动静态特性和鲁棒性得到有效的改善。
参考文献:
[1] 邱忠才,郭冀岭,王斌,等.基于卡尔曼滤波滑模变结构转子位置观测器的 PMSM无差拍控制[J].电机与控制学报,2014,18(4):60-65.
[2] 张刚,陈波.PMSM滑模观测器无位置传感器控制研究[J].微特电机,2016,44(02):54-57+61.
[3] 荆禄宗,吴钦木.嵌入式永磁同步电机无位置传感器控制方法综述[J].新型工业化,2018,8(10):20-24.
[4] 兰志勇,王波,王琳,等.基于滑模观测器的永磁同步电机无传感器控制[J].微特电机,2018,51(9 ):32-37.
[5] 叶帅辰,姚晓先.基于改进型滑模观测器的PMSM无传感器控制[J].微特电机,2019,47(11):56-59+64.
(注:本文来源于科技期刊《电子产品世界》2020年第07期第47页,欢迎您写论文时引用,并注明出处。)










评论