如何基于TMS320LF2407设计运动相机控制系统?

随着计算机和信息技术的飞跃发展,使具有快速和高精度处理能力的DSP出现并广泛应用。本文设计了一种通过DSP实现对运动相机控制的系统,可以使常规方式无法进行的拍摄工作变得轻松,并能达到理想效果。实现了相机快速到达指定位置,进行5点拍摄,并确保拍摄到的图像不失真。
本文引用地址:https://www.eepw.com.cn/article/201808/385100.htm1系统原理
基于TMS320LF2407的运动相机控制系统框图如图1所示。

DSP在GPIO的驱动下将输入的指令进行处理,经过光电耦合和功率放大后,驱动步进电机工作,步进电机和相机机架上的齿轮结构连接,控制相机完成5点拍摄工作。
运动相机的控制原理如图2所示。运动相机控制系统需要完成相机在某个时刻快速运动到指定位置1点,立即停止,对准目标拍照并保证图像清晰,然后以同样标准在位置2点、位置3点、位置4点、位置5点拍照,再按原路快速返回到位置1点,等待下一个拍摄周期的到来。
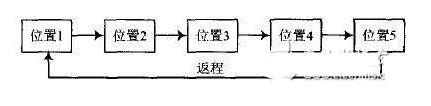
图2运动相机控制原理
2系统硬件设计
在运动相机控制系统中,需要控制相机做“重复启停”运动,即在某些时刻要求相机快速运动,在特定时刻迅速停止,并能保证停止时相机静止不动,确保拍摄到的图像不失真。因此要求所选电机应易于启停控制的同时,还要具有锁定能力。本系统采用运动控制系统中广泛应用的步进电机作为执行元件。
步进电机是根据组合电磁铁的理论设计的,是一种将有效电脉冲信号转变为相应的角位移或直线位移的开环控制元件。步进电机通过专用的电源把电脉冲信号按一定顺序供给定子各相控制绕组,在气隙中产生类似于旋转磁场的脉冲磁场,使每给步进电机加一个脉冲信号,步进电机就移动一步。步进电机的转速、停止的位置只取决于输入脉冲信号的频率和脉冲个数,不需要反馈信息和A/D转换,能够直接将数字脉冲信号转化为可控角位移。步进电机只有周期性的误差而无累积误差、可以在相当宽的范围内平滑调速、具有一定的自锁能力和易于启停控制等特点,非常适合运动相机控制系统。步进电机的控制系统如图3所示。当步进电机和负载已经确定之后,整个驱动系统的性能就完全取决于驱动电源和控制方法,步进电机驱动器由脉冲信号、信号分配、功率放大器几部分组成。脉冲分配方式采用软件脉冲分配,采用软件进行脉冲分配不用改变硬件线路,只需修改软件程序就能完成控制方案修改,不仅降低了成本,还提高了可靠性。

图3步进电机控制系统框图
根据电机所带负载相机的动力学要求、控制相机扫拍过程中电机运动规律和相机曝光时间的关系,选择使用ASM46AK-H100的谐波减速步进电机。 ASM46AK—H100步进电机减速比为1:100,最高分辨率设定为0.36(°)/脉冲,转矩为5N.m,最大转矩为11N.m,电源输入电流为 1.7A,电源输入电压DC24V,最大输入脉冲频率为250kHz(脉冲占空比50时),速度/位置控制指令是脉冲序列输入,容许速度范围为0~24r /min,能满足CCD的要求。在过载保护、过压保护、速度差异常保护、速度过快、EPROM数据错误、传感器异常、系统异常等保护功能工作时,输出警报信号,电动机自然停止。
步进电机驱动器选择配套的ASD18A-K驱动器,ASD18A-K驱动器提供控制用电源、转速控制脉冲、运动方向控制脉冲、A相脉冲输出、B相脉冲输出、定时、警报、分辨率转换和电流切换等电气接口。ASD18A-K驱动器可以通过功能转换开关调节分辨率、脉冲输入方式、电流大小,转速大小等,合理选择参数可以抑制低速运行时的振动,使启动时的动作更为平稳。
DSP选择高性价比且性能优异的数字信号处理器TMS320LF2407,集成了A/D、PWM发生器、光电编码器、接口电路等片内外设。具有丰富的片上资源,544BDARAM,2KBSARAM,32KBFLASH,2个事件管理器(每个均包含2个16位的通用定时器、8个PWM通道、3个捕获单元)用于产生驱动电机的PWM波形,16通道10位,转换时间为500ns的ADC模块实现模拟控制量的A/D转换、丰富的外部存储器接口(192K×16b:64KB的程序存储器,64KB的数据存储器、64KBI/O实现DSP与键盘及液晶显示光电耦合器起隔离和电压转换的作用)、看门狗模块、CAN、SCI、多个GPIO、5个外部中断、PLL等。非常高的运算性能,最高可达40MIPS,指令周期25ns.具有丰富的开发资源,JTAG、CCS、完备的技术文档支持、144pinLQFP封装。TMS320LF2407的I/O输出是3.3V的CMOS电平,采用245缓冲器转换成TTL电平后驱动步进电机驱动器ASD18A-K,ASD18A-K完成细分、环形分配和功率驱动。
3系统软件设计
控制系统程序由主程序、子程序和中断子程序组成,主程序完成系统初始化及各变量的初始化,子程序完成各控制面板的扫描,中断子程序实现控制面板上各参数设定的功能。相机控制流程图如图4所示。
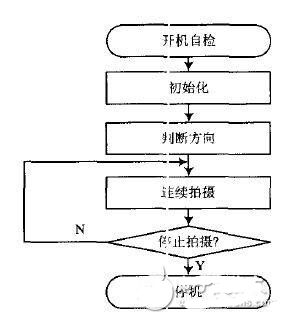
图4相机控制流程图
由于TMS320LF2407通过I/O口和驱动器连接,需要对接口初始化定义,IOPC5被配置为基本功能方式;PWM3IOPB2,IOPB5被配置为通用I/O方式;IOPC5被配置为通用I/O方式;在步进电机驱动程序设计中,充分运用TMS320LF2407控制器的事件管理模块。在 TMS32OLF24O7中各有一个16位比较寄存器CMPRx(x=4、5、6),每个比较寄存器各有两个比较PWM输出引脚,产生3路PWM输出信号,控制电机转速(位置),其输出引脚极性将由控制寄存器(ACTR)的控制位来决定,根据需要选择高电平或低电平作为开通信号。在PWM后号调制中需要周期一定的载波,这时用到了定时器3,它以内部CPU时钟作为输人,工作于连续增/减计数模式下,产生PWM脉冲输出,产生的脉冲为一个环形可变脉冲,这时由T3PR定时周期下溢和上溢时产生中断,刷新周期值,进行PWM调整。











评论