高级驾驶辅助系统ADAS电路设计集锦 —电路图天天读(41)

司机在驾驶过程中会面临非常复杂的交通状况。首先,司机需要对汽车进行动力控制。其次,他们还要保持对汽车周围环境的关注。第三,司机还要规定从出发点到目的地的导航线路。除此之外,司机还可能会同时使用车载信息娱乐系统或者与乘客聊天。辅助驾驶系统能帮助司机监测和处理稳定性、控制和导航三个层面的信息,这将能有效减少司机的工作负担,并且提高了操控的方便性和驾驶的安全性。防抱死制动系统和汽车稳定控制系统已经能够完成汽车稳定性层面上的任务。导航系统能够满足导航层面的需要,而且应用越来越广泛。在汽车的直接环境中,司机需要引导车辆保持在车道内行驶。鉴于此,电子发烧友技术编辑特整理一些ADDAS电路设计供工程师参考,不足之处还请见谅。
本文引用地址:https://www.eepw.com.cn/article/201710/369505.htmTOP1 高级驾驶监测车载系统电路设计
酒精浓度检测模块设计
酒精浓度检测模块主要由3个部分组成:酒精传感器,小信号放大电路和A/D转换器。酒精传感器是整个模块的核心,常用的酒精传感器主要有电化学酒精传感器,半导体酒精传感器等等。考虑到这套系统为车载系统,因此需要传感器具有体积小,精度高,响应快,抗干扰能力强的特点,我们选择了MQ-3酒精传感器。MQ-3传感器对乙醇蒸汽有很高的灵敏度和良好的选择性,它的测量范围是 10~1 000 ppm的酒精浓度,在测量范围内,该传感器的体电阻与空气中的酒精含量成线性关系,我们通过将体电阻的变化转化为一种电压的变化,就可测得空气中酒精的酒精含量。
该系统设计电路如图2所示。U1是酒精传感器,两个F引脚为加热引脚,用来给传感器预热,A,B引脚为信号输出,A接电源,B 与地之间串一个200 kΩ的采样电阻(实际电路中用一个电位器来替代),其作用是将体电阻Rs转化为电压输出,运放U2A组成一个同向放大电路,其放大倍数为1+R3/R2,这里R3=R2,所以放大倍数为2倍,然后运放输出端接A/D输入端,我们采用ATmega16L的片上A/D,其分辨率为10位,足以满足我们的采集需求。由此,得到输出电压与体电阻Rs的关系为。
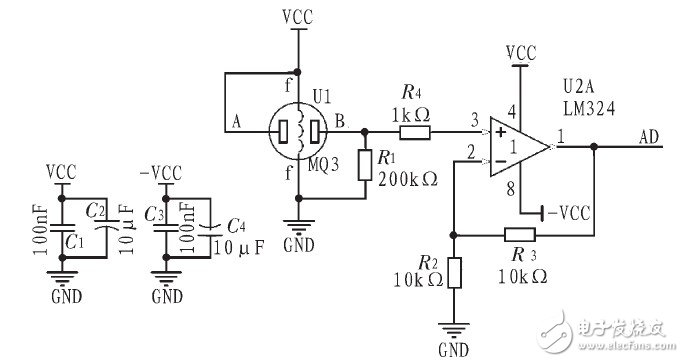
图2 酒精浓度检测模块电路设计
报警显示模块设计
报警显示模块用于酒精浓度的超限报警和日常信息的显示,由蜂鸣器和LCD5110组成,LCD5110是一款常用的液晶屏,供电2.7~5.5 V,通过不同的字库取模,可以显示数字,英文字母,汉字和图片,该款液晶还具有一个背光接口,在外部光线不足的时候可以用一个跳线帽点亮背光,提供照明。 LCD5110与主控MCU的通信采用SPI接口,但是为了硬件IO的通用性和软件的可移植性,本系统中用通用IO来模拟SPI时序,形成一个软件 SPI,因此我们将LCD5110的接口放在了5个通用IO而非专用SPI接口上,增加了布线的方便性。报警装置采用一个有源蜂鸣器,用一个NPN三极管做电流放大,如图3所示,三极管的基极通过一个电阻连接到主控的一个IO上,控制蜂鸣器发声与否。
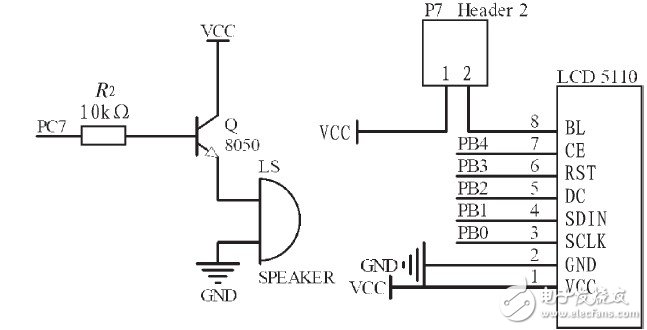
图3 报警显示模拟电路设计
主控模块设计
主控模块由单片机ATmega16L及其外围电路组成的最小系统构成。ATmega16L是一块8位单片机,其片上集成了一个10位的AD转换器,分辨率达到5/1024,足以满足酒精浓度检测模块中的采样要求;片上还有一个全双工串口,用于GPS模块和GSM模块的数据通信。ATmega16L普通模式下功耗仅为3.3 mW,非常适合本系统应用。其电路设计如图4所示。

图4 主控模块电路设计
汽车行驶记录仪的数据传输接口电路设计
USB数据传输接口电路设计
USB接口有数据传输速度快、连接简单、兼容性好等特点。汽车行驶记录仪国家标准考虑到RS232接口使用的普及性和USB接口的先进性,规定了同时使用这两种接口实现数据通信。在USB数据传输的设计方案中采用PDIUSBD12芯片作为USB控制器。PDIUSBD12完全符合USB1.1版规范;同时它还符合大多数器件的分类规格;还适用于许多外设,如打印机、扫描仪、外部的存储设备和数码相机等,它使得当前使用SCSI的系统可以立即降低成本。
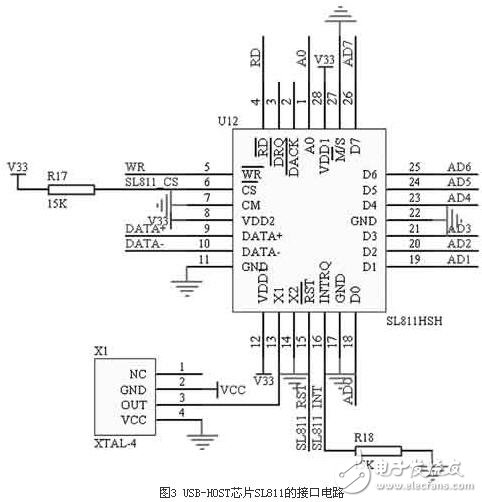
单片机直接读写闪存盘,可以实现便携设备或者嵌入式系统的外挂式海量存储。这一技术的核心是USB-HOST技术,FAT文件系统规范的实现,海量存储协议的实现以及USB批量传输方式的实现,涉及到的协议众多,技术难度非常高。在如图3所示的设计方案中,USB接口芯片采用的是Cypress公司的USB-HOST接口芯片 SL811,该芯片支持USB1.1协议、价格低、性能突出且可靠性高。文件系统采用FAT格式,可以兼容Windows 98和Windows 2000/XP。对于大多数厂家生产的闪存盘都可以成功存取。
为了提高电路的可靠性和EMI特性,在电路板设计和布线的过程中应注意以下一些规则:在电源、地线之间加上去耦电容;尽量加宽电源、地线宽度,最好是地线比电源线宽;信号线布在电(地)层上;在大面积的接地(电)中,常用元器件的引脚与其连接,对引脚的处理需要进行综合的考虑;布线设计完成后,需检查布线设计是否符合设计者所制定的规则,同时也需确认所制定的规则是否符合印制板生产工艺的需求。
欲了解视频监控相关解决方案与电路图设计,可关注电子发烧友荣誉出品的Designs of week栏目:

TOP2 采用ADAS3023同步数据采集系统电路设计
采集系统电路设计
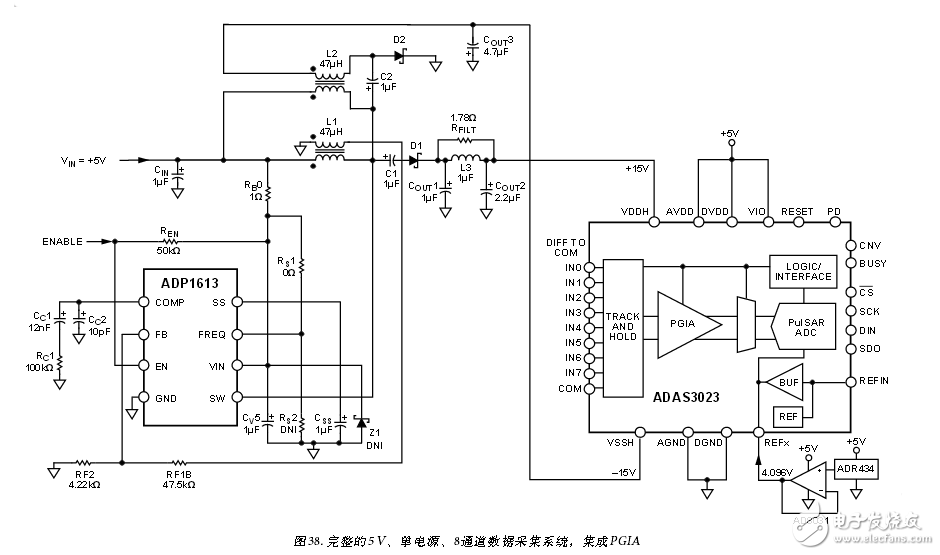
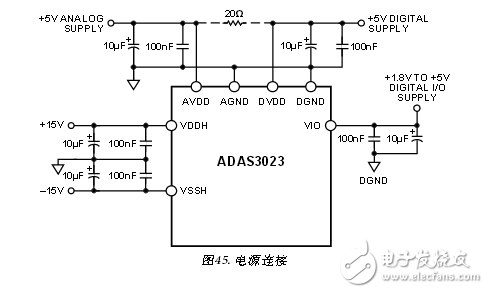
ADP1613用于低成本SEPIC-uk拓扑,是ADAS3023在外部5 V电源供电情况下,为其提供20 mA时所需±15 V高压稳定电源以及最大值为3 mV的低输出纹波的理想选择。ADP1613尽可能地减少了外部元器件数目,并且具有超过86%的效率,因此它能满足ADAS3023的规格要求。如图为采集系统电路设计。
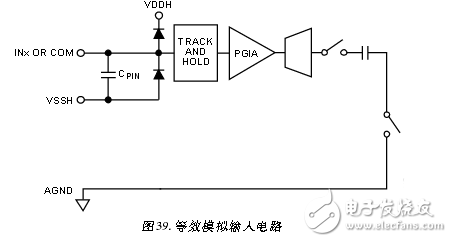
等效模拟输入电路设计
在各通道输入(IN0至IN7)与公共参考(COM)之间使用差分输入结构,所有通道同时采样。图39显示了这些输入的等效电路。二极管为模拟输入(IN0至IN7)和COM提供针对高压电源(VDDH和VSSH)的ESD保护。应确保模拟输入信号不超过供电轨0.3 V以上,否则会造成二极管正偏,并开始传导电流。超出绝对最大额定值的电压可能导致ADAS3023永久性损坏。
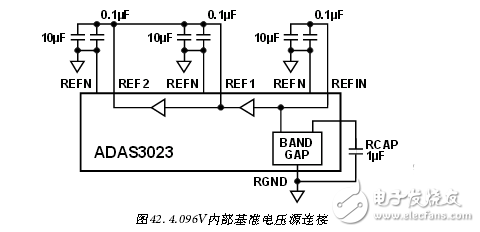
内部基准电压源设计
精确的内部基准电压源经过工厂调整,适合大部分应用。将CFG寄存器中的REFEN位置1(默认值)则使能内部基准电压源,并可在REF1和REF2引脚上产生4.096 V电压;该输出电压用作主要的系统基准电压。未经缓冲的2.5 V(典型值)带隙基准电压输出至REFIN引脚,需采用外部10 μF和0.1 μF电容的并联组合以降低输出端噪声。REFIN的电流输出有限,如果后接一个适当的缓冲器,如AD8031等,则它可以用作一个源。由于内部放大器使用固定增益,REFIN输出的负载过高会降低4.096 V系统的基准电压。内部基准电压输出经过调整后达到预期的4.096 V,初始精度为±8 mV。基准电压还经过温度补偿,典型温漂为±5 ppm/°C。使用内部基准电压源时,ADAS3023应按照图42所示进行去耦。REF1和REF2连接均短接在一起,并利用REFIN输出和RCAP 内部调节电源上的适当去耦电容去耦。
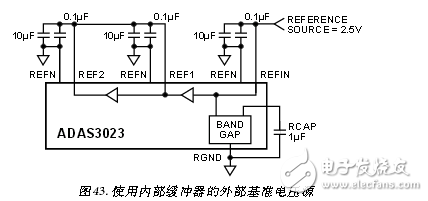
外部基准电压源和内部缓冲器设计
当采用通用系统基准电压源,或者要求具有更佳的漂移性能时,则需使用外部基准电压源和内部缓冲器。将REFEN位设置为0便可禁用内部带隙基准电压源,允许用户向REFIN引脚提供外部基准电压(典型值为2.5 V)。内部缓冲器保持使能状态,因此无需使用外部缓冲器放大器,即可产生主要的系统基准电压。当REFIN = 2.5 V且REF1、REF2输出4.096 V时,这将是系统的主要基准电压。就本配置而言,如图43所示连接外部基准电压源。由于内部缓冲器可处理ADAS3023基准电压要求的动态变化,因此任何2.5 V的基准电压均可用于此配置。
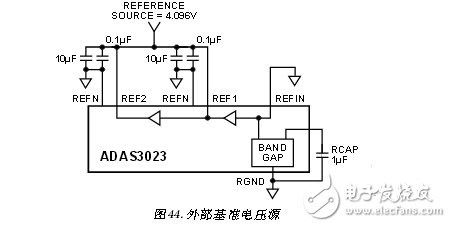
外部基准电压源设计
对于需要精确、低漂移、4.096 V基准电压的应用,可以使用外部基准电压源。在这种模式下,禁用内部缓冲器需要将REFEN置位为0,并将REFIN驱动或连接至AGND,因此需要硬件和软件两种控制。若仅驱动REF1和REF2引脚但却没有禁用内部缓冲器,则会导致驱动放大器的输出端发生源电流/吸电流冲突。将4.096 V精密基准电压源直接连到REF1和REF2,以作为系统的主基准电压(参见图44);推荐两种基准电压源ADR434或ADR444。若使用运算放大器作为外部基准电压源,则在驱动容性负载方面需多加留意。
内核电源设计
AVDD和DVDD引脚分别为ADAS3023的模拟和数字内核供电。这些电源需要足够的去耦,每个电源上至少包括一个10 F电容和100 nF电容。100 nF电容应尽可能靠近ADAS3023。为了减少所需电源的数量,DVDD可以通过一个简单的RC滤波器(连接在AV D D与DVDD之间)从模拟电源供电。
ADAS3023通过消除信号缓冲、电平转换、放大/衰减、共模抑制、建立时间简化了设计挑战,也避免了其他模拟信号调理挑战,同时实现更小的尺寸、更短的上市时间和更低的成本。可编程增益ADAS3023集成一个可编程增益仪表放大器(PGIA),它具有四个可选范围。PGIA设置由一个输入引脚和 COM引脚上的最大绝对差分输入电压确定。上电与默认条件预设为±20.48 V (PGIA = 11)输入范围。由于ADAS3023能够采用任何输入类型,比如双极性单端或伪双极性等,因此必须设置PGIA以充分利用器件允许的输入范围。您觉得这一款完整的16位逐次逼近型模数转换器性能如何,在未来电子设计中还有什么需要改进的地方?
TOP3 汽车油量监测报警器电路设计
汽车的油箱油量检测通常是由水平检测器 来完成的。当油箱储满燃油时,浮标动臂升起,将电位器的阻值调至最小(也有部分车型是将电位器的阻值调至最大),使油量计 (实际上是一只毫安表)的指针作满标度的偏转;当油箱中的油量水平下降时,可变电阻器的阻值被调高 ,流过系统回路的电流将随之变化,油量计的指针读数也变小。本例介绍的汽车油量监测报警器装置,能形象、直观地显示出汽车油箱内燃油的多少,还可以在油位降低至一定值时发出声光报警,以提醒驾驶员及时加油。
电路工作原理
该汽车油量监测报警器电路由油位监测电路、油位显示电路、缺油警示电路和电源电路等组成,如图6-103所示。
油位监测电路由二极管VD2、辅助电位器RP1和汽车油箱内浮筒式电位器RP2组成。油位显示电路由发光二极管VL2~VL7、晶体管V2~V7等组成。缺油警示电路由二极管VD3、晶体管V1、发光二极管VL1,集成电路IC2、扬声器BL和有关阻容元件组成。电源电路由二极管VD1、三端集成稳压器IC1和滤波电容器C1~C3组成。+l2V电压经VD1降压和IC1稳压后,产生+9V电压,供给IC2和V1~V7等电路。在汽车油箱内储满燃油时,RP2的阻值在浮标的作用下滑向最小值,使V2~V7均导通,发光二极管VL2~VL7均点亮。当油箱内油量降为一半时,RP2的中心头滑至中间位置,使V2~V4导通,V5~V7截止,VL2~VL4仍亮,VL5~VL7熄灭。当油箱内油位降低至限位时,RP2的阻值变为最大值,V2~V7均截止。VL2~VL7均熄灭,使V1导通,IC2的4脚由低电平变为高电平,由IC2和外围元器件组成的多谐振荡器振荡 (工作频率为lOHz左右)工作,IC2的3脚间断输出高电平,使发光二极管VL1闪亮,扬声器BL发出“嘟、嘟”的报警声。若仅黄色发光二极管VL2 亮,则说明油箱内即将缺油。
汽车驾驶辅助系统双CMOS图像传感器采集电路设计
TMS320C6414是TI公司推出的一款高性能数字处理器,具有强大的硬件结构和软件系统,可适用于抗晕光 图像采集 系统。TMS320C6414的 L2容量为l024KB,通过cache配置寄存器(CCFG)的L2MODE字段把L2配置为第5种模式,即把片内SRAM设置为768 KB。TMS320C6414经EMIFA端口,以EDMA方式将图像数据同步读入内部SRAM。增强型直接存储器访问(EDMA)用于实时图像数字信号处理,可在CPU后台完成存储空间中的数据转移,把外部存储器中的图像数字信息快速、高效地传输到DSP内部SRAM中。设置EER控制寄存器的EVT4 位为l,即采用EDMA的第4通道(EDMA4)采集图像数据。该通道配置为32位传输方式,每次中断搬移一帧图像数据存入内部SRAM。
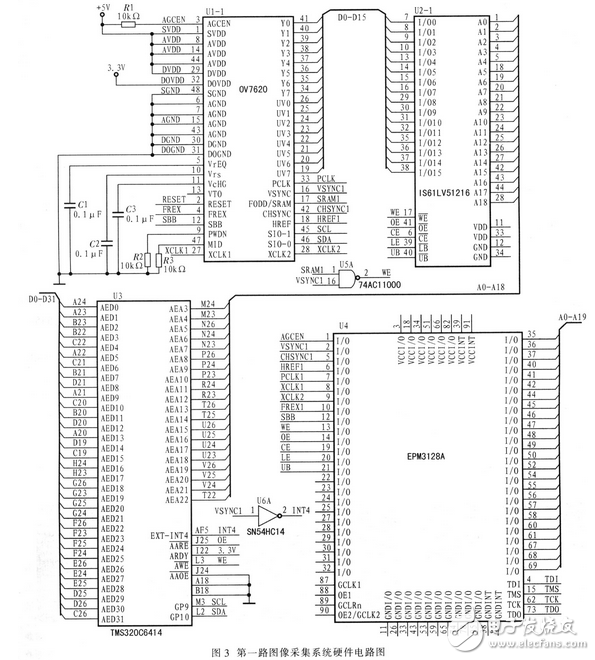
为了同步采样,第一路OV7620的SRAMl和VSYNCl可通过与非门控制两路OV7620同步采样并分别存储到各自连接的IS6lLV51216 中;VSYNCl下降沿标志OV7620一帧图像数据输出结束,VSYNCl经反向器接至TMS320C6414的AF5引脚触发EDMA4中断,并同时读取IS6lLV51216中存储的图像数据。CPU采用阈值化分割算法来处理图像信息。在TMS320C6414控制下同步进行图像信息的传输和处理,完全满足系统的实时要求。TMS320C6414外接40 MHz的晶体振荡器,CLOKMODE[l:0]设置为10,使其内部频率高达480 MHz。DSP通过I/O端口检测OV7620的同步信号VSYNC、CHSYNC以及像素时钟PCLK,保证DSP能够准确读取OV7620输出的数字图像数据。在同步信号和像素时钟的干预下保存采集的数字图像数据,保证传输数字图像的完整性。图3所示为第一路图像采集系统硬件电路图。
基于单片机的智能驾驶监控系统电路设计
检测模块电路设计
检测模块的电路组成如图2 所示,由运动方向识别传感器和互锁电路组成。运动方向识别传感器由红外线发射管,光电三极管组成,由CD4013 组成的双稳态电路组成方向识别互锁电路,以便在实际应用中起到一定的抗干扰作用。系统的前端检测部分利用两组红外线发射接收对管,安装于车门的两侧,用于判断乘客上、下车,并用来向单片机系统送出计数信号。当车门打开时,系统开启;当有人上车时,红外线传感器检测上车人数,单片机系统实现对人数加计数,并通过L ED 数码管显示;当有人下车时,单片机实现减计数,并通过L ED 数码管显示。
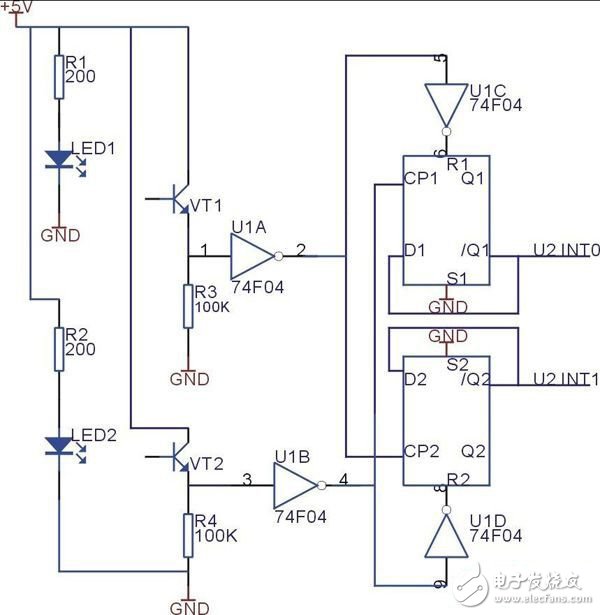
图2 检测电路模块
红外线传感器指能够发射红外线和接收红外线的器件。红外线传感器根据其机理不同可以分为被动型红外线传感器和主动型传感器。其中主动型红外线传感器,包括红外发射管和红外接收传感器,这2 种传感器配套使用可组成一个完整的红外线检测、遥控系统,这类传感器也称光探测型感器本系统使用了其中的红外发射二极管和红外接收二极管来检测判断客车载客人数。
控制模块电路设计
控制模块利用在单片机内预先设定载客人数,当上车人数超过此设定值时,单片机便通过继电器控制客车的电子打火器,锁定客车执行机构,使客车无法启动,并以L ED 显示当前人数,同时通过蜂鸣器发出报警。制模块电路电路组成如图3 所示,包括L ED 数码管显示电路、报警电路和汽车执行锁定电路。在数码管显示电路设计中,将待显示数据转换为BCD 码输出,经过共阴极数码管译码驱动器74LS48 将BCD 码转换成七段码送给数码管显示。报警电路比较简单,当超载时,系统通过软件控制蜂鸣器实现报警。
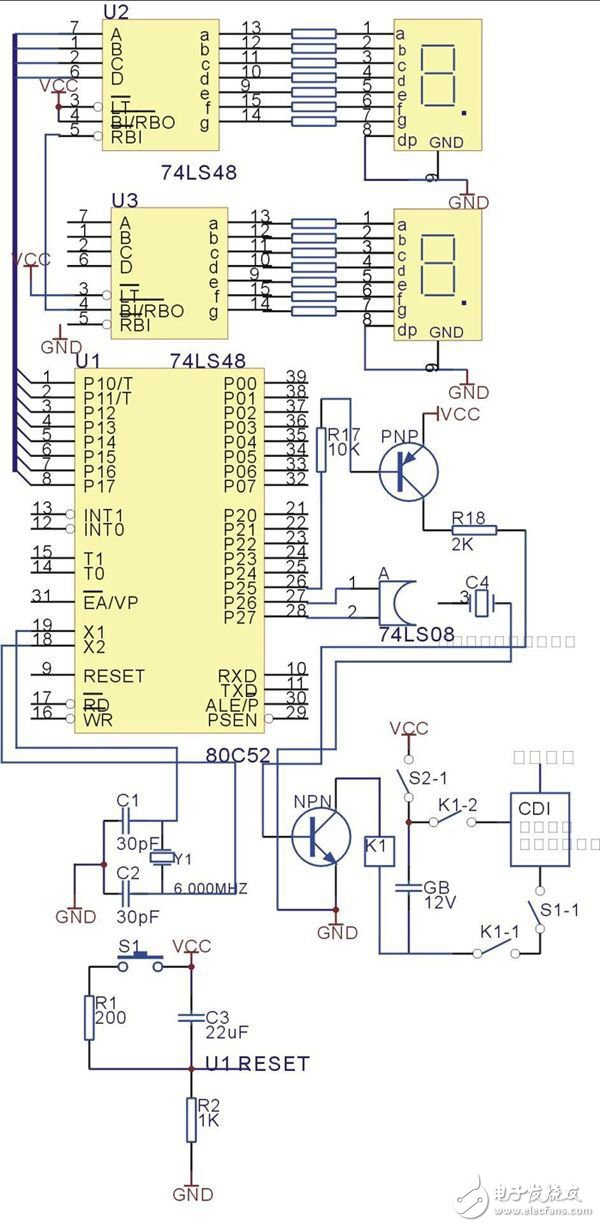
图3 控制模块电路
对汽车的锁定电路中继电器选用J RX13F 型12V直流常闭继电器,其常闭触头接在汽车的高压回路中。当打开启动开关(即点火开关) 时,由于P2. 5 口处于低电平,所以继电器不动作,对汽车正常工作没有影响。当车内人数超过预定人数,即超载时,单片机系统向P2. 5 送高电平,继电器动作,其常闭触头断开,切断汽车的高压回路,驾驶员无法启动汽车发动机。当车内人数恢复到预定人数以下时,单片机系统再次送低电平到 P2. 5 口,继电器动作,其常闭触头闭合,汽车又恢复正常的启动,从而有效地限制了客车的超载行为。
欲了解视频监控相关解决方案与电路图设计,可关注电子发烧友荣誉出品的Designs of week栏目:
TOP4 汽车智能驾驶辅助系统数据发送与接收电路设计
发送模块硬件设计
NPX I芯片具有4 KB的用户可编程空间、4 KB的定制ROM,以及一个2D的LF输入级。各类传感器的信号经12位ADC转换后,提供给用户和系统进行进一步的处理。在4 KB的定制ROM中,固化了GE公司特有的压力、温度和电压测量、补偿和校准程序,以及其他实用的子程序,用户可省去繁复的运算编程,只需简单调用即可获得需要的状态值。在开发阶段,GE公司可以提供可编程版本的传感器,用户可以通过仿真器编程器将程序下载到器件的4 KB用户可编程空间中。下载程序之后的传感器可以直接运行使用,或者通过仿真器进行实时仿真单步调。调试环境与一般的单片机非常相似。客户大批量生产版本的传感器可以通过掩膜ROM工艺生产,以进一步降低成本。
接收模块硬件设计
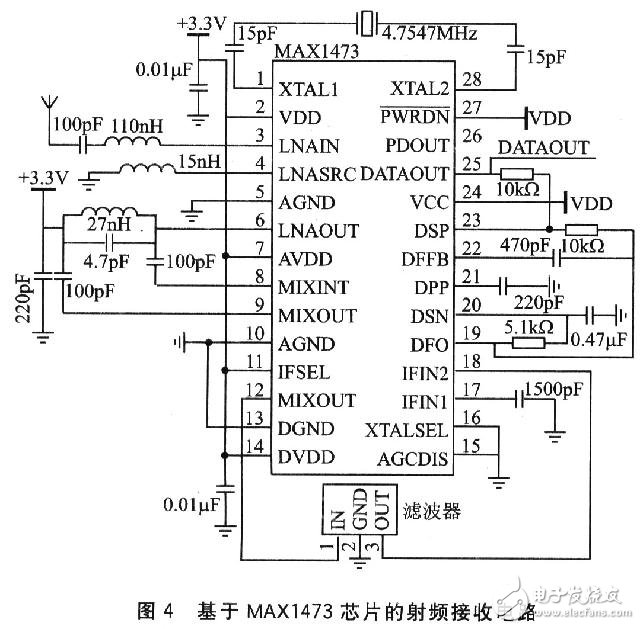
TPMS系统的接收模块主要由天线、射频接收电路、主控芯片MCU以及键盘、显示器组成,用于接收各发射模块传送的轮胎温度与压力数据,显示各轮胎的 ID识别码和测量数据,并在异常情况发生时声光报警。由于接收模块安装在汽车车厢内,故对器件选用的各方面要求不高,工业级即可。
RF 接收芯片选用时要求接收灵敏度较高,这里选用Maxim公司的MAXl473芯片。MAXl473是一款完全集成的、低功耗、CMOS超外差接收器,具有一114~O dBm的输入信号范围、高于50 dB的镜像载波抑制,用于接收300~450 MHz频率范围的幅度键控(ASK)数据信号非常理想。这款芯片在关断模式下电流消耗低于2.5μA,接收模式下电流消耗为5.2 mA,可接收高达100 kbps的数据速率。使用MAXl473芯片实现的315 MHz的射频接收电路如图4所示。
信号调理电路设计
信号调理电路的任务和工作条件是:1)带宽和增益,对20 kHz、毫伏级的信号放大约1 000倍,且动态范围较大;2)供电电源,车载电池供电,使用单电源放大电路,电池额定电压为7.2 V;3)信号转换,对放大后的信号进行幅度检波。使用分立元件搭建电路虽然能实现该功能,但电路复杂,调试不方便,并且电路性能会随电池电压的波动而变化。常见的通用运放如OP07、LM324、 LM358等,对于20 kHz信号无法满足带宽和增益的要求,同时,其输出摆幅较小。近年来出现的一些新的集成运算放大器能很好地承担上述任务。如OPA228系列运放、 MAX445l系列运放。特别是MAX4451双运放,-3 dB带宽达210 MHz,可以在+4.5~+11 V单电源条件下工作,输出摆幅大,具有轨到轨输出,开环增益大于50 dB,使用两级放大外加负反馈完全能胜任。实际电路如图1所示。
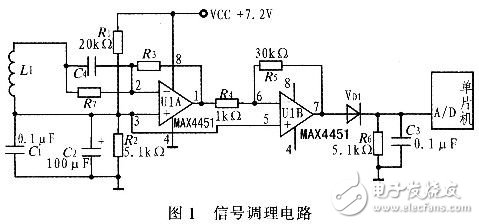
智能车是靠电池驱动的,随着工作时间持续,电池电压必然下降。由于运放MAX4451的共模抑制比极高,典型值CMRR=95 dB,所以在单电源条件下可正常工作,并且,电池电压的波动基本不影响运放的工作性能。
图 1中L1是检测线圈。R1、R2分压为运放提供输入偏置电压,适当调节R2可改变放大器的输入偏置电压。由于第2级放大电路的增益设定为 (R5/R4)=30倍,可根据检测线圈L1输出感应电动势的大小,适当选择R3改变第1级的放大倍数,从而使总增益满足要求。引入R7是为了降低第1级放大电路的直流增益,从而提高静态工作点的稳定性。但R7的引入降低了第1级电路的交流放大能力,故接人C4=0.47μF实现交流旁路。VD1、R6和 C3构成幅度检波电路,VD4选择压降较小的高频锗二极管,检波电路的时间常数τ=R6C3一般选择为激磁电流(f=20 kHz)周期的3~5倍,C3的容量越大,输出到单片机A/D端的直流电压中的20 kHz波纹越小,但C3的容量过大将导致电路响应时间长,对智能车与赛道的偏离反应迟钝.C3的实际取值应在此估算的基础上通过测试确定。
基于ARM9的汽车视频监控防盗系统设计
本文基于三星公司的S3C2410为控制中心, 设计一种汽车视频监控系统。系统主要由S3C2410处理器、USB摄像头、触摸显示屏组成, 阐述了系统硬件设计的基本工作原理, 平台定制和摄像头图像监控防盗程序的设计流程。采用摄像头对图像数据进行采集, 触摸显示屏对视频图像进行存储和处理, 达到防盗的目的。
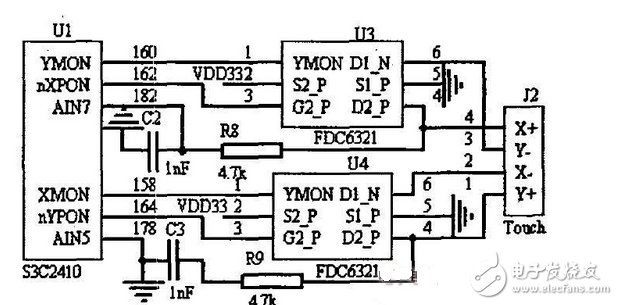
触摸显示屏接口电路
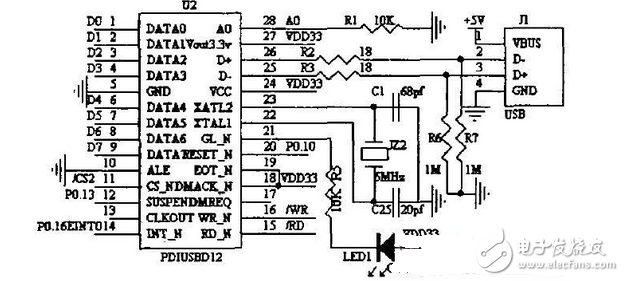
USB接口电路
TOP5 汽车传感器之信号处理电路设计
以80C31单片机为核心的轮速传感器硬件结构外围电路有信号处理电路、总线控制及总线接口等电路。轮速传感器产生信号经滤波、整形、光电隔离后,送80C31的/INT0输入引脚。T1作定时器使用,对脉冲信号进行周期测量。SJA1000, 82C250组成与CAN总线的控制和接口电路。在轮速传感器的设计过程中,充分考虑其抗干扰和稳定性,单片机的输入/输出端均采用光电隔离,用看门狗定时器(MAX813)进行超时复位,确保系统可靠工作。
信号处理电路设计
根据轮速传感器信号特性,处理电路由限幅电路、滤波电路和比较整形电路组成,如图4所示。
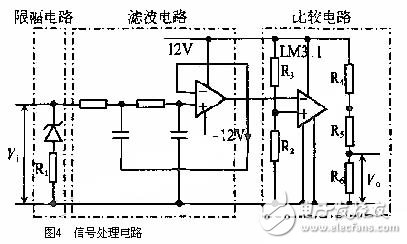
限幅电路将轮速传感器输出信号Vi正半周的幅值限制在5V以下,负半周使其输出为-0.6V。滤波电路设计成带反馈的有源低通滤波器,其截止频率为 2075Hz(按最高车速为200km/h设计,传感器输出信号对应的频率),选Q=0.707。比较整形电路中设置一定的比较电压,与滤波器输出信号相比较输出方波信号。LM311N输出方波的幅值为10V,经R5,R6分压后得幅值为5V的方波信号送光电隔离器。
高级驾驶辅助系统之传感器及其接口电路设计
方向盘转角传感器接口
方向盘转角传感器的输出为正交编码脉冲。正交编码脉冲包含两个脉冲序列,有变化的频率和四分之一周期(90°)的固定相位偏移,通过检测2路信号的相位关系可以判断为顺时针方向和逆时针方向,并据此对信号进行加/减计数,从而得到当前的计数累计值,也即方向盘的绝对转角,而转角的变化率即角速度,则可通过信号频率测出。另外,方向盘转角传感器有一个零位输出信号,当方向盘在中间位置时,该信号输出0V,否则输出5V,通过该信号,可对绝对转角进行在线校准。
C164CI 与方向盘转角传感器的接口电路如图6所示。片内内置增量编码的正交解码器,该解码器使用定时器3的两个引脚(T3IN、T3EUD)作为正交脉冲的输入,在正确设置相关寄存器后,定时器3的数据寄存器的值与方向盘转角成正比,故可方便的计算转角,本文所使用的方向盘转角传感器每一圈对应44个脉冲,设定时器3的数据寄存器为T3,则绝对转角为。
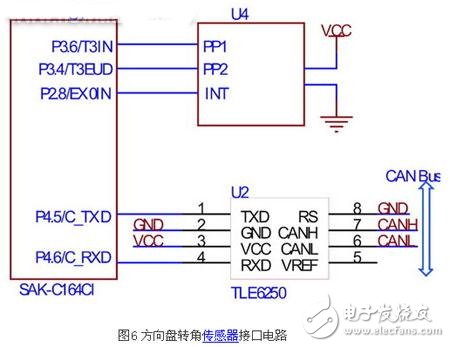
进行差分运算,即可得到转角变化速率。微控制器把计算得到的参数通过CAN发送给ECU。
轮速传感器接口
根据前面部分介绍的轮速传感器信号特点,设计接口电路如图7所示。
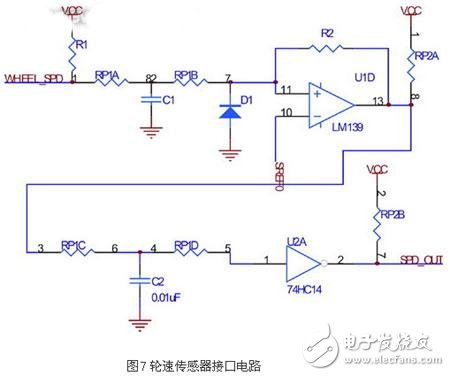
电路采用两级滤波和整形,以保证轮速信号在极低转速下不会丢失,同时避免因悬架振动引起的信号干扰。图中由电阻R2引入第一级迟滞比较,而使用74HC14引入第二级迟滞比较。
横摆角速度、纵向/横向加速度传感器
调整图8中各个阻容元件的参数,即可设置滤波截止频率和延时大小。汽车运行过程中,在较好路面上行驶时,由于信号较好,延时尽量要小,而在颠簸路面上行驶,则希望滤波效果要好。但是由于硬件滤波的频率特性一经设计完毕,无法实时修改,故需要在软件中设计数字滤波环节。数字滤波常用的有维纳滤波器、卡尔曼滤波器、线性预测器、自适用滤波器等。在这里选用计算量小、实时性能好的一阶低通滤波。
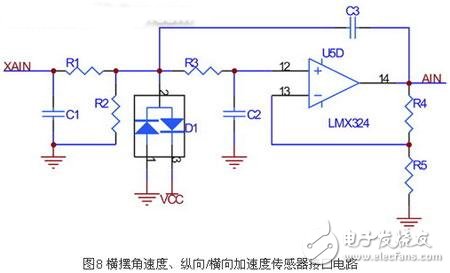
本文讨论了ESP系统中常用传感器的结构特点及信号特性,并设计了各个传感器的信号处理接口,其中包括硬件接口电路以及软件处理方案。设计了包含横摆角速度、纵向/横向加速度传感器的集成模块,通过CAN总线与ECU进行数据传输,具有较好的抗干扰性和可靠性。
欲了解视频监控相关解决方案与电路图设计,可关注电子发烧友荣誉出品的Designs of week栏目:
TOP6 汽车辅助系统CAN总线接口电路设计
单片机最小系统
本设计中,应用到单片机为ATMEL公司51系列的89C51,该型号的单片机应用广泛,技术成熟,市场上价格便宜,而且在学习中所学到的多为该型号,在本次设计中是首选的芯片。89C51单片机作为系统的核心控制部分,但在本设计中不是重点讲解内容,其相关技术应用和引脚特点功能等,可参照其他相关资料。设计的电路原理方框大致如下图所示。设计中为避免出现时钟信号的冲突,对单片机的外接晶振引脚XTAL1、XTAL2不接上外围电路,而是通过控制器 SJA1000的时钟信号脚反馈给单片机。同时,对单片机的复位信号处理,RST引脚接上X5045P的RST脚,复位信号可由X5045P输出,在 X5045P芯片看门狗外围电路的作用下,减少了以往由电阻、电容组成的简易复位电路造成的不精确、延时高等不良作用,使单片机回复到初始状态,完成复位操作。由于在该电路中要用到单片机的存储作用,存储由SJA1000传输过来的处理数据。因此,脚/EA接上高电平,选用片内ROM。对ALE脚,也即地址锁存有效信号除数端是和控制器 SJA1000的ALE脚接通。
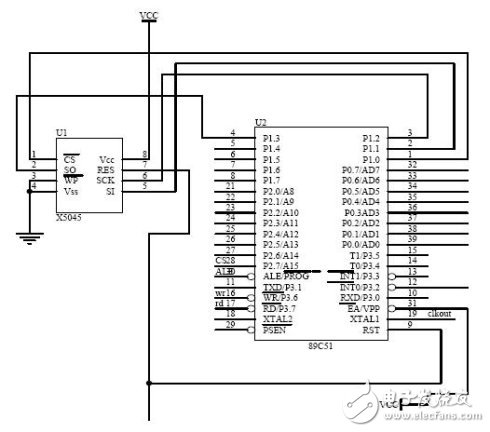
图2-2 单片机最小系统
基于SJA1000的控制电路设计
控制器SJA1000作为本接口电路中的控制部分,应用本设计中,对于SJA1000和单片机的连接,引脚AD0~AD7是和89C51的输出输入脚 P0.0~P0.7相接;SJA1000的片选信号脚/CS必须由微控制器的P2.7口控制否则这个片选输入必须接到VSS 也可以通过地址解码控制例如当地址/数据总线用于其他外围器件,ALE对应ALE,读/写输入脚/WR、/RD,/INT和单片机的/INT0连接,由于在该系统中要用到相同的时钟频率,所以我们要时钟信号引脚CLKOUT和单片机的XTAL1脚相连,达到频率一致的目的;而在复位信号的处理,可以在看门狗外围电路的RST信号输出后再通过和非门电路的相连,很好的实现了电路的复位作用。而对于控制器的收发引脚TX0,TX1与RX0,RX1,在本系统中 TX0、RX0可和收发器82C250的TXD、RXD接通。同时,在和CPU接口中SJA1000 支持对两个著名的微型控制器系列的直接连接80C51 、68xx 。通过SJA1000 的MODE 引脚可选择接口模式Intel 模式 MODE 高;Motorola 模式 MODE 低。在Intel 模式和Motorola 模式里地址/数据总线和读/写控制信号的连接。本设计中,正是使用Intel模式。对SJA1000的Vdd1~Vdd3电源输入脚,外接上驱动+5V电压;而Vss1~Vss3输出接地。设计中,对SJA1000提供16Mkz的晶振。
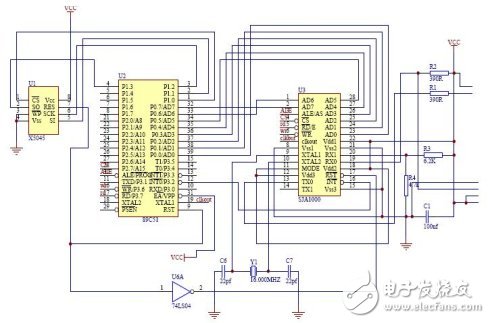
图2-4 SJA1000控制电路
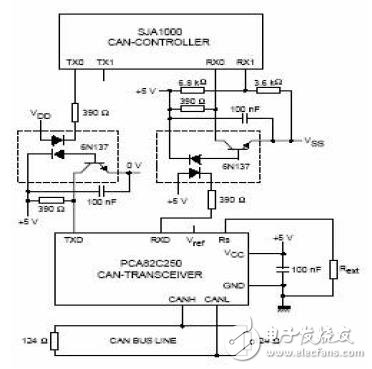
基于82C250收发电路设计
82C250是CAN控制器与物理总线间的接口,可以提供对总线的差动发送和接收能力,与IS011898标准完全兼容,并具有抗汽车环境下的瞬间干扰、保护总线的能力。设计中,收发器的接受、发送脚原理上要和SJA1000的发送、接受脚相连接。但这样一来,两者的电气不一致,造成电气隔离,给通信带来麻烦。为此,在它们之间接上高速光耦合器6N137,避开了电气隔离,更好的实现通信联系。82C250的TXD、RXT就对应接上6N137的输出脚OUT和输入脚 IN;脚Rs作为斜率控制电阻输入端,电阻的大小可以割据总线通信速度适当调整一般在16~140KΩ之间,设计中Rs阻值为47KΩ。在通过接一个 47K电阻分流之后,可以接地。电压引脚Vcc,其电源电压:4.5V〈 Vcc〈 5.5V,在设计中采用5V电压。Vref作为基准电压输出端,设计中可以接地。而CANH,CANL脚是信号的输入输出,实现对电平信号的传送,通过它们连接上双绞线,完成通信传输。
基于X5045P的电路设计
X5045P在本设计中做为复位、监控电路使用,虽然增加了电路连接的复杂和成本,但对于电路的稳定和可靠性有起到很大的作用,是系统中不可缺少的部分。对X5045的操作是通过4根口线CS、SCK、SI和SO进行同步串行通信来完成的。SCK是外部输入的同步时钟信号。在对芯片定改指令或数据时,时钟前沿将SI引脚信号输入;在读邮数据时,时钟后沿将数据位输出到SO引脚上。数据的输入/输出都是高位在先。在设计中,/CS脚和单片机P1.0、 SI、 SCK、SO、RST分别与单片机的引脚P1.0~P1.3、RST连接。对于不用到的引脚,可以直接和地相连。电路设计如下:
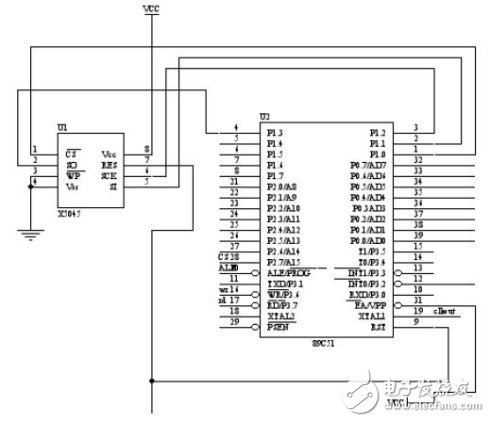
图2-10 X5045P电路监控、复位电路
TOP7 电源电路设计
设计中,对系统的电源都一致采用DC+5V电压,光耦部分电路所采用的两个电源Vcc和Vdd必须完全隔离。为此,设计电源如下所示:
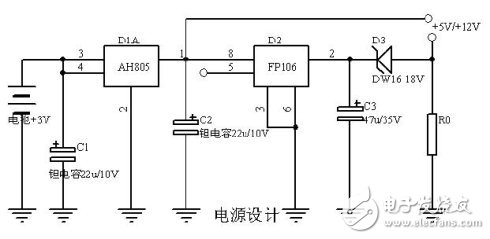
图2-11 电源电路
它由AH805升压模块及FP106升压模块组成。AH805是一种输入1.2~3V,输出5V的升压模块,在3V电池供电时可输出100mA电流。 FP106是贴片式升压模块,输入4~6V,输出固定电压为29±1V,输出电流可达40mA,AH805及FP106都是一个电平控制的关闭电源控制端。两节1.5V碱性电池输出的3V电压输入AH805,AH805输出+5V电压,其一路作5V输出,另一路输入FP106使其产生28~30V电压,经稳压管稳压后输出+12V电压。从图中可以看出,只要改变稳压管的稳压值,即可获得不同的输出电压,使用十分灵活。FP106的第⑤脚为控制电源关闭端,在关闭电源时,耗电几乎为零,当第⑤脚加高电平2.5V时,电源导通;当第⑤脚加低电平0.4V时,电源被关闭。可以用电路来控制或手动控制,若不需控制时,第⑤脚与第⑧脚连接。
接口电路总体电路原理图
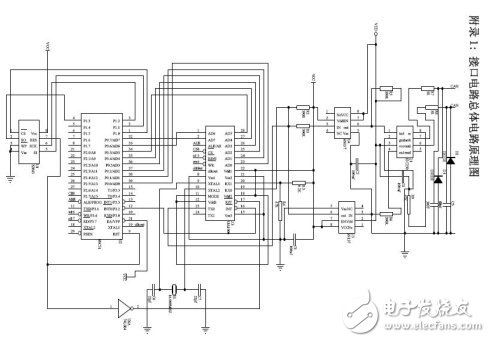
现场总线标准及其技术日益成为国际自动控制领域关注的一大焦点,其原因是它改变了传统控制系统的结构,形成了全新的网络集成分布式控制系统。在我国,现场总线已经发展到推广应用阶段,中国已经成为各种现场总线激烈争夺的重要战场。因此研究现场总线技术及其产品就显得尤为重要。本文正是基于控制器 SJA1000和82C250收发器的基础上,外接上看门狗电路芯片X5045P及高速光耦合器6N137,设计CAN总线接口电路,该电路理论上很好的实现了设计原理要求。该设计简单明了,在电路实现时,还需考虑各模块间的接地、屏蔽等诸多问题。PCA82C250提供对物理总线的符合CAN电气协议的差动发送和接收功能,另外,它具有的电流限制电路,还提供了对总线的进一步的保护功能。通过 82C250与物理总线进行连接,可使总线支持多达110个节点的挂接。对于CAN控制器及带有CAN总线接口的器件,82C250并不是必须使用的器件,因为多数CAN控制器均具有配置灵活的收发接口并允许总线故障,只是驱动能力一般只允许20~30个节点连接在一条总线上。
基于ADAS的无线接口电路设计
无线射频接收芯片MC33594
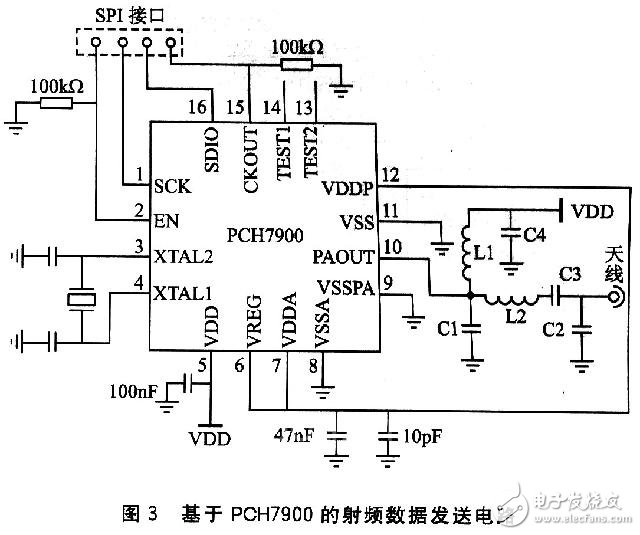
摩托罗拉的MC33594器件是高温集成UHF超外差无线电接收模块。该芯片采用LQFP-24封装,工作频率在300~450MHz频段,电压在 4.5~5.5V范围内;接收灵敏度高达-103dBm。芯片最大的特点是带有一串行外设接口SPI(Serial Peripheral Intelface)。通过SPI,它允许CPU与各种外围接口器件以串行方式进行通信,交换信息。SPI接口使用四条线:串行时钟线(SCK),主机输入/从机输出数据线MISO,主机输出/从机输入数据线MOSI和低电平有效的从机选择线RESET。
TPMS系统设计中较关键的一点是数据的传输部分。整个数据传输部分由两部分组成:一是驾驶室中的无线接收部分,另外一部分是轮胎中的无线发射部分。这两部分数据传输的准确性、稳定性,将是系统优良性能的重要体现。
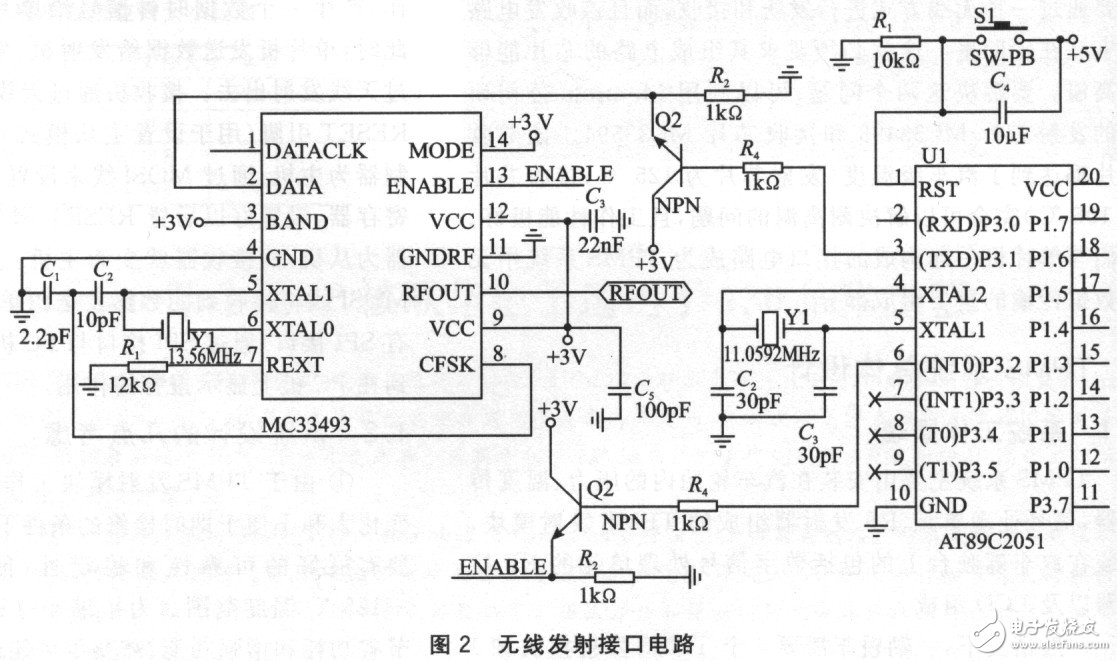
无线发射电路由发射芯片MC33493、AT89C2051单片机和电平转换电路构成,如图2所示。发射模块中,引脚3(BAND引脚)接3V高电平,表示系统发射频率为434MHz,用于选择工作频率;引脚 14(MODE引脚)接高电平,表示系统选择FSK调制模式。FSK调制方式定义为一个信号的两个不同的频移值分别表示数字高、低两种电平。在这个系统中,低频移表示数字高电平,高频移表示数字低电平。发射芯片的FSK调制方式由与晶振串联的下拉负载电容C1来实现。与CFSK引脚相连的有一内部开关,用以选通下拉电容C1。当DATA=O时(MODE引脚置高电平),开关关闭,此时输出高频移;当DATA=1时,开关接通,此时输出低频移,这就实现了 FSK调制方式,也就是说,如果载波频率是433.92MHz而且总的频偏是士△f(MHz),则数字高电平表示为433.92MHz-△f,数字低电平表示为433.92 MHz+△f。
欲了解视频监控相关解决方案与电路图设计,可关注电子发烧友荣誉出品的Designs of week栏目:
TOP8 无线接收接口电路设计
无线接收接口电路主要由接收芯片MC33594与AT89C2051单片机构成,如图3所示。接收芯片MC33594通过SPI接接口与单片机 AT89C2051的I/O口相连。该电路中,利用AT89C2051单片机的I/O口模拟SPI接口,通过用软件控制的方式来进行数据的传送。
利用并口P1.1来模拟SPI的SCK输出端,P1.2模拟MCU的数据输出端(MOSI),P1.3模拟SPI的数据输入端(MISO),P1.4模拟 SPI的从机选择端RESET。在接收之前,首先置RESET引脚为低电平,使接收机变为从机,而单片机变为主机。单片机通过MOSI信号线将单片机内的程序写入接收机的配置寄存器里对接收机进行配置,配置好后再置:RESET引脚为高电平。此时单片机变为从机,而接收机变为主机,它产生时钟信号,同时数据由RFIN端接入,经低噪声放大器放大后送入混频器,使其变换成中频。在中频级,经变换的信号在送入解调器之前被放大和滤波。
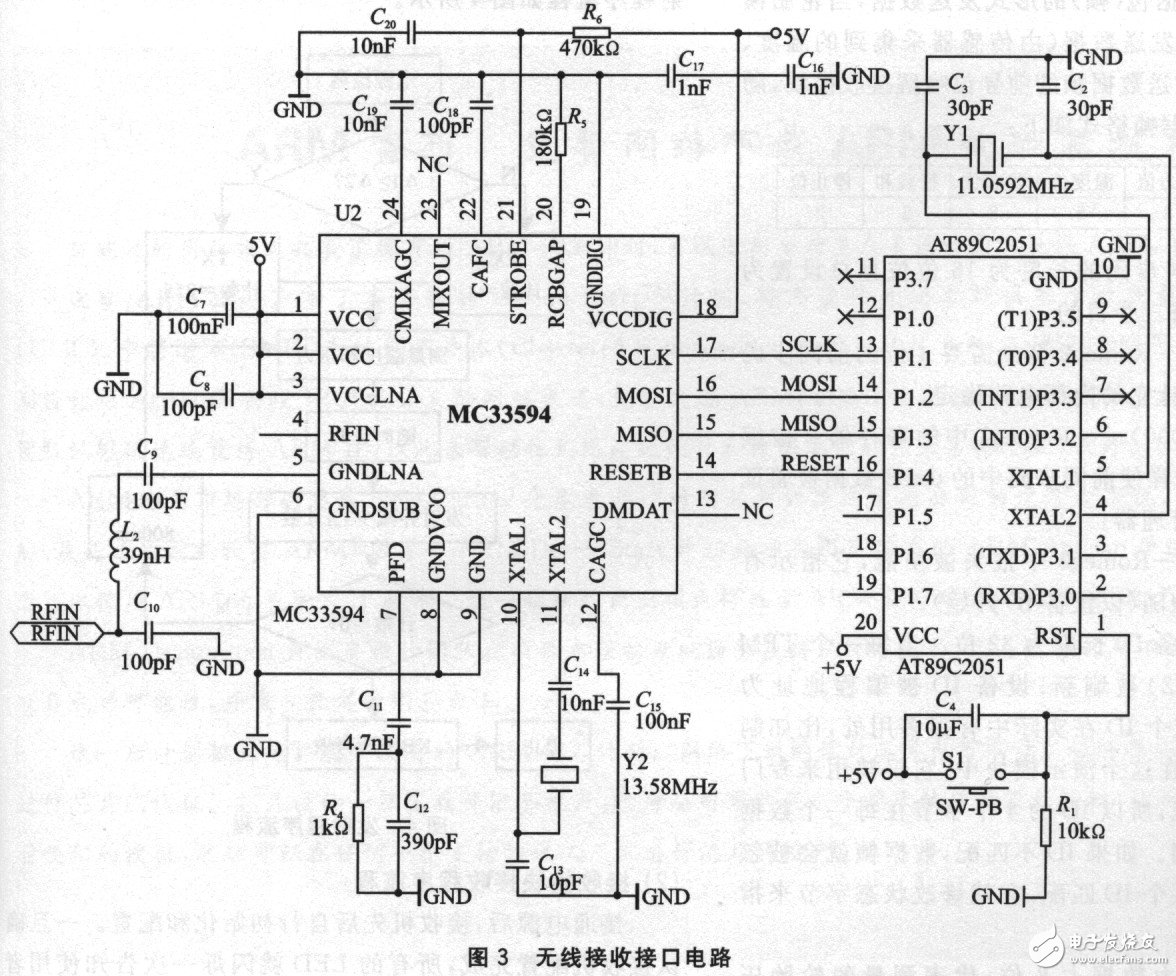
为了与MC33594接收机所设定的SPI工作状态在逻辑时序上协调一致,要使串行时钟输出P1.1的初始状态为1,在选通MC33594后,置 P1.1为O。此时AT89C2051单片机输出1位SCK时钟,同时,使MC33594串行左移,从而输出1位数据至AT80C2051单片机的 P1.3(模拟MCU的MISO线),再置Pl.1为1,使AT89C2051单片机从P1.O输出1位数据(先为高位)至AT89C2051单片机。至此模拟1位数据输入输出完成。以后再置P1.1为0,模拟下一位的输入输出。依此循环8次,可完成1次通过SPI传输8位数据的操作。其程序包括MCU串行输入、串行输出和串行输入/输出3个子程序。MCU串行输入是从接收机的MISO线上接收8位数据并放入寄存器R0中;串行输出是将AT80C51单片机中R0寄存器的内容传送到接收机的MOSI线上;串行输入/输出将AT89C2051单片机R0寄存器的内容传送到MC33594的MOSI线上,同时从MC33594的MISO线上接收8位数据。由MOSI引脚将接收到的数据送入到单片机,这样数据就可以在PC机上进行显示了。
高级驾驶中雷达无线传输系统电路设计
硬件系统设计
系统以MSP430F2274微控制器为核心,外围电路由超声波发射电路、超声波接收电路、声光报警电路、通信接口电路、键盘液晶显示电路五部分组成,下面逐一介绍。
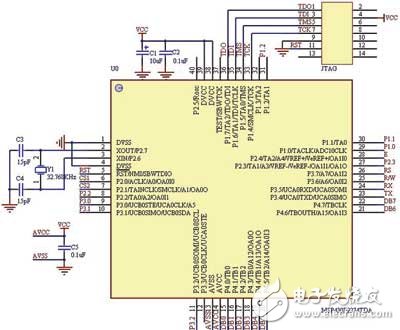
图2 倒车雷达系统主控电路图
系统的主控电路图如图2所示。本系统中选用的MSP430F2274片内有32Kb闪存和1Kb RAM,因此无须外扩存储器。外接的32.768kHz晶振作为CPU关闭状态Basic-TImer的时钟源,同时也作为系统的车载时钟使用。
超声波发送模块电路如图3所示,由超声波产生和发射两部分组成。超声波的产生方法有两种:硬件发生法和软件发生法。常用的硬件发生法常采用如下方案:超声波由CD4011构成的振荡器振荡产生,经升压变换推动超声波换能器而发射出去,振荡器的起振和停振由单片机来控制。本设计采用软件发生法,因为通过软件发生法既可以减少硬件的复杂程度,降低系统的成本,又具有灵活性强、容易实现、稳定性好的优点。本系统利用MSP430F2274单片机的定时器功能来产生稳定的PWM(40Hz)脉冲波,并通过I/O端口P2.3输出到超声波发射部分。在超声波发射电路中CD4049一共包括了6个非门,图3中线路仅使用了3个,为了防止干扰或被静电击穿导致整个CD4049损坏,把没有使用的那一侧的3个非门串起来做接地处理。当控制端输出一系列固定频率脉冲时,在压电陶瓷型超声波发射换能器UCM-40-T上就固定频率的加正电压和反电压,发出大功率的超声波,所得到的波形比其他方式效果更理想。
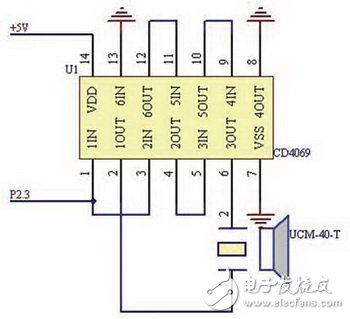
图3 倒车雷达超声波发送模块
超声波接收电路如图4所示。这是本系统设计和调试的一个难点。压电陶瓷型超声波接收器 UCM-40-R 接收反射的超声波转换为40kHz毫伏级的电压信号,需要经过放大、处理、才能用于触发单片机中断。一方面传感器输出信号微弱,由于反射条件不同,需要放大倍数的范围大约是100~5000,另一方面传感器输出阻抗较大,需要高输入阻抗的多级放大电路,而高输入阻抗容易接收干扰信号。通常采用两种方案:一是采用运算放大器组成多级选频放大电路;二是采用专用的集成前置放大器。第一种方案容易产生自激振荡,要使接收电路达到很好灵敏度和抗干扰效果,电路的调试是较困难的。本系统采用专用的集成电路前置放大器 CX20106,它由前置放大器、限幅放大器、带通滤波器、检波器、积分器、整型电路组成。其中前置放大器具有自动增益控制功能,可以保证在超声波传感器接收较远反射信号输出微弱电压时放大器有较高的增益,在近距离输入信号强时放大器不会过载。调节芯片引脚5的外接电阻R3,将它的滤波器的中心频率设置在 40kHz,达到了很好的效果。当接收到与滤波器中心频率相符的信号时,其输出引脚7输出一个低电平,而输出引脚7直接接到MSP430F2274的 P2.2上,以触发中断。
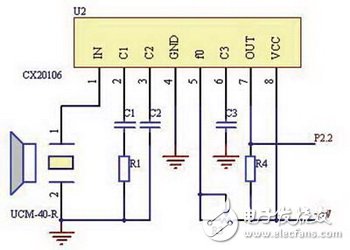
图4 倒车雷达超声波接收模块
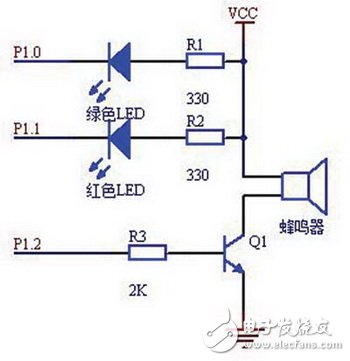
图5 倒车雷达声光报警电路图
报警模块采用简单的声光报警电路,如图5所示。先设定一个临界值,当车尾与障碍物的距离小于设定的最小距离时,红色指示灯闪亮,绿色指示灯熄灭。单片机向其端口发出PWM脉冲,随着距离的减小,通过控制PWM脉冲的占空比使闪光和蜂鸣的频率加剧,以此来提示驾驶员。
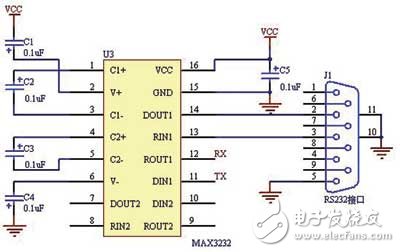
图6 倒车雷达通信接口电路图
通信接口电路如图6所示。采用美信的MAX3232芯片,外围电路非常简单,只需要5个0.1μF的电容器。该电路把单片机串口输出信号隔离变换成 RS-232信号发送到汽车总线上,同时还可以实现该系统与计算机的通信。
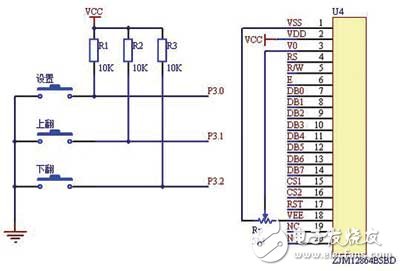
图7 倒车雷达键盘显示电路图
键盘和显示电路如图7所示,由键盘和液晶显示两部分组成。其中键盘采用独立式按键,有3个按键,一个设置键、一个上翻键、一个下翻键。可以进行报警值、工作方式、时钟等各个参数的设置。液晶显示电路采用ZJM12864BSBD这款低功耗的点阵图形式LCD,显示格式为128点(列)&TImes;64点(行),具有多功能指令,容易使用,可实时的显示时钟、距离和报警提示信息,方便直观。
TOP9 基于ADAS嵌入式导航仪电路设计
北斗基带芯片处理模块及电路
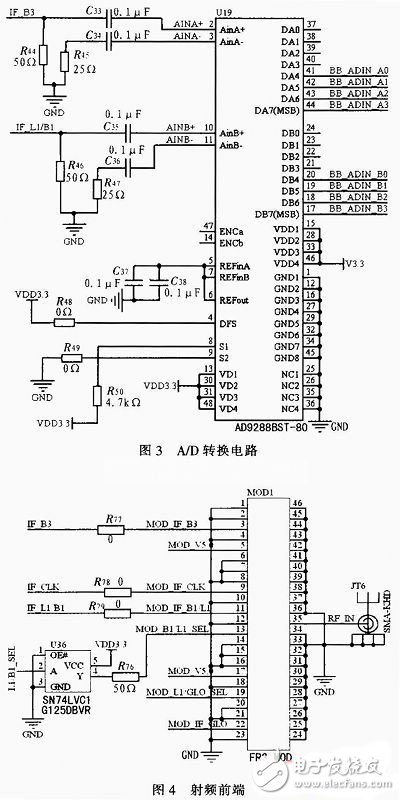
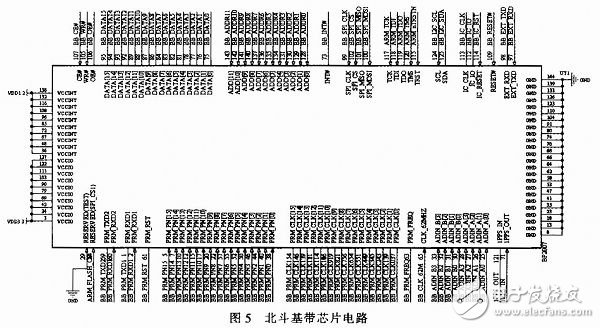
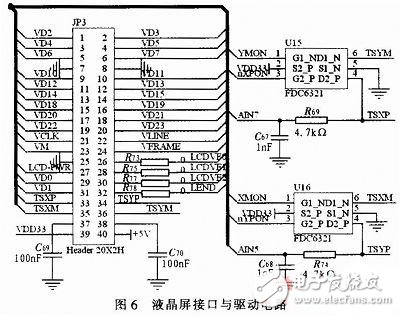
北斗基带芯片采用的是HwaNavchip-1芯片,可快速捕获北斗系统B1和B3频点的精密测距码和北斗/GPS卫星的普通测距码,具有较快的捕获速度、极高的动态跟踪范围和测量精度,通过串口输出标准的二进制或NMEA-0183格式的信号,数据被传送到解析程序进行验证处理,计算出位置信息,并在液晶显示器上进行显示。这部分电路的主要工作原理和过程是将射频信号经过下变频成为模拟中频信号再通过A/D转换得到导航信号,这些信号经过基带处理模块和导航信息处理模块捕获、跟踪、解算得到输出的导航信息。A/D转换和射频前端电路分别如图3、4所示,北斗基带芯片部分电路如图5所示。
底板硬件电路
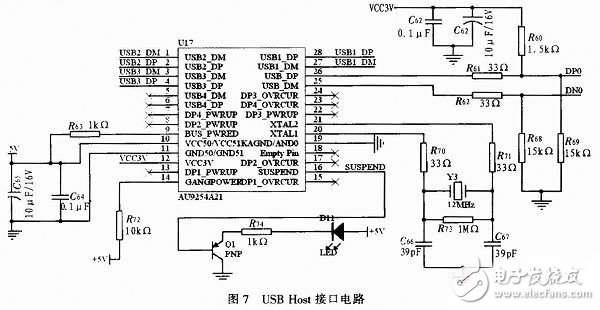
彩色液晶屏接口及触摸屏驱动电路
S3C2440A内置有液晶控制器,可以支持最大256 k色TFT彩色液晶屏、最大4 k色STN彩色液晶屏。彩色屏上带有触摸屏(为四线电阻式触摸屏),用于检测屏幕触摸输入信号,有利于提高人机交互的友好性。在使用的时候,需要一套切换控制及ADC转换电路,用于切换触摸屏的X、Y轴输入,并进行A/D转换。接口与触摸屏驱动电路如图6所示。
TOP10 USB接口电路设计
S3C2440A具2两个USB Host控制器和1个USB Device控制器,本设计只使用了DN0、DP0引脚作为唯一的下行口,为此还设计了1个USB集线器电路.通过集线器可以方便对USB下行口进行扩展,USB集线器芯片采用的是MICRO公司的AU9254。用于电子海图、导航定位软件更新,导航数据下载保存等。电路连接如图7所示。
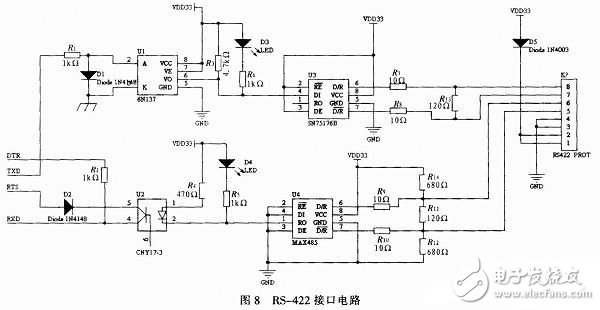
RS-422接口电路
目前船舶驾驶台导航设备均采用RS-422接口进行数据互联,由于接收器采用高输入阻抗和发送驱动器比RS-232更强的驱动能力,允许在相同传输线上连接多个接收节点,所以RS-422支持点对多的双向通信,采用全双工通信模式,差模传输,抗干扰能力强,能给ECDIS和雷达等导航设备提供实时北斗导航定位信息。电路如图8所示。
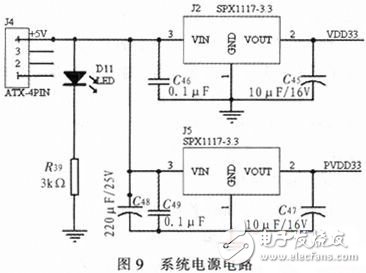
电源电路
本系统使用的电源电路图9所示,5 V的电源经过C46、C48和C49滤波后,由两片低压差电源芯片将电源转换为稳定的3.3 V电源,分别给主板供电(电路图中VDD33)和给核心板供电(电路图中PVDD33)。
本系统的硬件平台为三星公司的S3C2440A微处理器。S3C2440A的核心处理器(CPU)是一个由Advanced RISCMacllines有限公司设计的16/32为ARM920T的RISC处理器。ARM920T实现了MMU、AMBA、BUS及Harvard 高速缓冲体系结构。这一结构具有独立的16KB指令Cache和16KB数据Cache。每个都是由8字节的行组成。通过提供一整套完整的通用系统外设,S3C2440A减少整体系统成本和无需配置额外的组件。
电子发烧友网技术编辑点评分析:
在过去的几年中,高级辅助驾驶系统的市场已经开始蓬勃发展。目前,以舒适性为导向的系统(如ACC)主要应用在中级或豪华轿车上。未来,这些系统将会被涵盖到安全系统当中,并且在经济型轿车中得以应用。
但是,高级辅助驾驶系统的发展不应该仅仅被视为一个技术问题,其中包括很多与司机之间的影响,以及和车辆结构之间的影响关系。这就使得系统需求的方法是非常复杂和重要的。西门子VDO汽车公司通过pro.pilot网络将自己视为一个系统集成者,更有效地来迎接挑战。
大家如有问题,欢迎在评论处讨论。
——电子发烧友网整理,转载请注明出处!












评论