一种声定位自动泊车系统设计

现代化城市交通拥堵,泊车要求较高的驾驶技术,且可能导致交通阻塞、驾驶员神经疲惫和保险杠撞弯等不良后果。如果利用微机控制的自动泊车系统,则可以较好地实现
本文引用地址:https://www.eepw.com.cn/article/201610/309169.htm车辆的安全停泊,乃至最终实现汽车的自动驾驶。现代科学技术的快速发展,尤其是计算机技术和传感器与检测技术的快速发展为自动泊车提供了可能。自动泊车系统可以解决驾驶员尤其是初学者的烦恼,提升汽车的主动性安全水平,减少泊车入位所消耗的时间,减缓停车场的拥堵程度,提高停车场的利用率。
目前,很多的停车场车位引导系统能够引导车辆顺利进入目的车位,但还需驾驶员根据停车场显示屏中所显示的车位引导信息来驾驶车辆,没有实现车辆运行自动控制和自动泊车。本文所设计的方案首先检测出每个车位是否有车辆停放,由给定的停车车位分配方法得到下一辆车进入停车场之后所要停放的车位;以声源定位为基础,实时测量出车辆在停车场中所处的位置,通过无线电通讯,与车内的车辆运行自动控制系统进行信息传输,控制车辆的运行,最终实现车辆的自主泊车。
1 总体方案设计
1.1 停车场及车辆模块设置
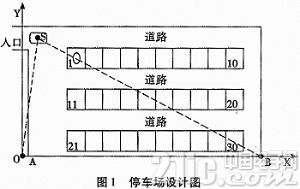
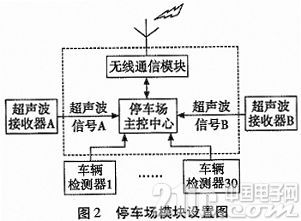
设计停车场的车位分布(如图1所示)。停车场共设30个车位,每个车位下边埋有车位检测器,用来检测车位的占用情况。停车场四周的边框为停车场的边界,建立平面直角坐标系XOY(见图1)。在A点和B点分别安装超声波接收器,用以检测车辆发出的超声波来对声源(车辆)进行定位。在停车场中还设有无线电通信设备,以实现与车辆的无线通信。停车场主控中心负责将地面各个传感器得到的信息进行处理,并控制无线通信模块与车辆进行通信。停车场的模块设置及信号关系如图2所示。
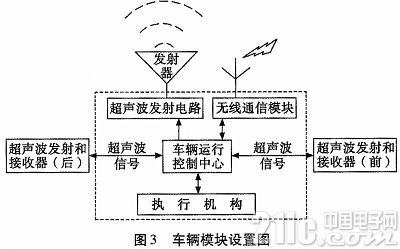
在车辆顶部中央装有超声波发射器,用以发射超声波来进行声源定位。在车辆的头部和尾部中央处安装有超声波发射接收装置,用来检测车辆可能遇到的障碍物或其他车量,避免发生危险。在车辆的顶部还装有无线电发射和接收装置,以实现和停车场主控中心的无线通信。车辆各模块设置及信号关系如图3所示。
1.2 系统工作流程
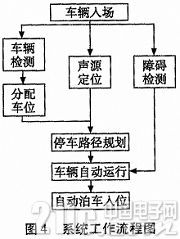
系统工作流程如下:
当车辆进入停车场之后,启动自动泊车系统。车辆检测器检测每个车位是否被占用,将车位占用信息传给停车场主控中心来进行车位分配,得到要停入的车位坐标;声源检测模块实时进行声源定位,得到车辆的坐标信息并传给主控中心;停车场主控中心通过无线通信模块将以上两个坐标信息传给车辆内的车辆运行控制中心,车辆运行控制中心根据得到的坐标信息和停车场的车位、道路分布情况,规划出泊车路径,控制车辆自动运行、停车入位。在车辆运行过程中,车辆前方和后方的超声波发射接收装置实时检测车辆前后是否有障碍物。一旦发现有障碍物,则立即通过车辆运行控制中心实施刹车,避免发生危险。
系统工作流程如图4所示。
2 各模块设计
2.1 车辆检测模块
车辆检测模块主要用于检测车位上方是否已有车辆停放。目前停车场一般采用超声波探测器或车辆探测器来进行检测。
超声波探测器工作原理:在停车场上方安装超声波探测器,由上向下发射超声波,对从地面或车辆上反射回来的反射波的区别,通过处理器进行分析,从而做出有无车辆的判断,并输出相关信号。
车辆检测器工作原理:在室外停车场停车处地面下方埋放地感线圈,对线圈上方有车或无车时的电感量的区别,通过车辆检测器的处理器进行分析,并输出相关信号。
超声波探测器在室外使用时受其它声源干扰较大,而且本方案在声源定位模块和障碍物检测模块均使用了超声波,因此在此处采用车辆检测器。车辆检测器输出车位是否被占用的信号给停车场主控中心,由停车场主控中心根据预定的车位分配方案分配要停入的车位,得到要停入车位的坐标信息。
2.2 声源定位模块
声源定位模块用来实时检测声源的位置,得到车辆的坐标信息。
移动声源:在车辆的顶部安装超声波发生器。鉴于系统工作环境复杂,声波频率多而杂,若使用频率较低的声波极易受到干扰,造成车辆坐标检测错误。因此,选用超声下的高频段频率40 kHz,提高系统的抗干扰能力。在发射声波的同时发射无线电信号,通知停车场主控中心,以开始计时。
由于声源定位模块发射的信号为超声波信号,且整个系统是完全协同工作的模式,为了降低系统的复杂度与系统可实现性,可采用比较传统的时延估计方法,即利用车辆发送超声波信号的同时发出无线电信号,告知停车场主控中心,停车场主控中心及时打开定时器,当主控中心判定收到声波信号时关闭定时器,然后计算两者的差值△t,即可获得时延估计值。
超声波发射的时间间隔:需要注意超声波发射时间间隔T的选择。由于超声波和无线电信号是同时发出的,如果时间间隔T太小,则会导致接收器在接收到声波信号之前又接收到下一次发射的无线电信号,导致无法测量声源的位置;如果时间间隔T太大,则在一定时间内对距离的测量次数过少,所测的结果实时性差。本停车场的对角线长不超过60 m,可得超声波最大传播时间tmax为:
其中,v0为声波在空气中传播的速度,约为340 m/s。故,时间间隔T应取:T≥tmax。
在一定范围内,时间间隔应越小越好,以增强检测的实时性,故取时间间隔T为tmax。
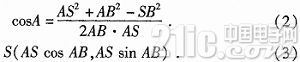
考虑系统本身的要求,本方案采用了二维的定位方法。假设移动声源的初始位置在S点,由时延估算法可以得到SA和SB的值,AB的距离在停车场设计时已经规划好,为已知量。通过下面的算法可以得到小车在平面直角坐标系XOY中的坐标:
2.3 障碍物检测模块
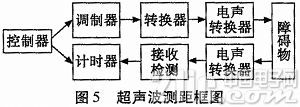
障碍物检测模块用来检测车辆前方或后方是否有障碍物,比如前后驶来的车辆等。在车的最前端中央和最后端中央分别安装超声波发射接收装置,通过超声波发射装置发出超声波,根据接收器接收到超声波的时间差就可以得到障碍物的距离。超声波发射器向某一方向发射超声波,在发射时刻同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。根据计时器记录的时间t,就可以计算出车辆距障碍物的距离S:
超声波测距框图如图5所示。
需要注意的是此超声波的频率不能和车顶部用来定位用的超声波频率相同,否则会引起干扰,发射的时间间隔也需特别注意。
2.4 车辆运行自动控制模块
车辆运行自动控制模块用来规划自动泊车路径,制定车辆运动策略,将车辆驱动到目标停车位。
最小转弯半径是指:当转向盘转到极限位置,汽车以最低稳定车速转向行驶时,外侧转向轮的中心平面在支承平面上滚过的轨迹圆半径。它在很大程度上表征了汽车能够通过狭窄弯曲地带或绕过不可越过的障碍物的能力。转弯半径越小,汽车的机动性能越好。假设车辆的最小转弯半径为Rmin,当车辆在道路上转弯时,均以此最小转弯半径来执行,以降低对停车场空间的要求。
为了保证车辆准确沿着直线运动,需要使用惯性导航仪的反馈来实现转向轮的方向校正;车辆的位置可由声源定位模块实时检测并传给车辆内的自动运行控制器;最后,使用步进电机分别控制车辆的方向盘、油门、刹车来控制车辆的运动、停止、加速、减速。自动泊车过程中,需要不断监视车的情况,在车辆的前后中央处分别安装超声波发射接收装置,来实时测定车辆的前部和后部与可能出现的障碍物的距离,一旦出现意外情况,车辆运行控制器可以立刻控制车辆停止,避免发生危险。
车辆运行控制器接收到主控中心传来的目标车位坐标和车辆所处的坐标后,结合停车场的车位、道路、环境等预知的实际情况,规划出泊车路径,制定泊车策略,控制车辆的前进、后退、油门、转弯、刹车等,使车辆最终停入目标车位。
车辆转弯时可控制步进电机将方向盘打到最大位置,以最小转弯半径转弯。本方案设计的车辆停入车位的过程属于车辆行驶方向与车位垂直的情况,倒车入车位的步骤可总结如下:
1)控制车辆向前驶过停车位,使自己的车辆中心处与要停入的车位中心在X轴上的距离为最小转向半径;
2)原地将方向盘往相反方向打到最大位置,慢速后退,直至车辆方向与车位方向平行;
3)回正方向盘,让车平行后退,直至到达目标位置。
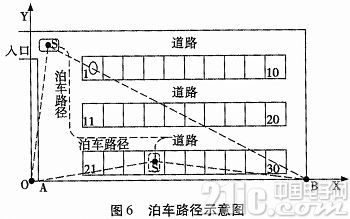
假设目标车位为24号车位,可做如图6所示的路径规划:
最后,由车辆运行控制器来控制车辆的泊车过程,直至泊车入位。在泊车过程中,一旦遇到意外情况(例如前方或后方又驶来一辆车),车辆运行控制器可根据车辆前后中央安装的超声波发射接收装置探测到的距离信息立刻控制车辆停止,避免发生危险。
3 结束语
本文从原理层面设计了声定位自动泊车系统的工作过程,为自动泊车系统的工程实现提供了思路。本方案具有以下特点:
1)本方案集传感器技术、自动控制、数据处理等多种高技术于一体。设计合理,且可以实时检测障碍物,避免发生危险;
2)本方案采用超声波和平面直角坐标系定位,给出了位置标定的一种新方法;
3)本方案中还可以在小车周围安装超声波传感器或摄像头以及其他装置来在野外环境(非专门停车场环境)下,寻找足够的空间来当作停车车位,实现自动泊车。





评论