机载导弹一控四电动舵机控制器研究与设计

摘要:电动舵机作为导弹飞行的执行机构,其体积重量的减少有利于导弹性能的提升。为了减小体积重量和节约成本,电动舵机采用三相无刷直流电机+滚珠丝杠直连式结构,采用一个控制器来控制四路舵机。介绍了控制器的硬件结构方案和控制策略,控制器以DSP+CPLD为核心架构,采用位置、速度双闭环PI控制,实现单一控制器同时控制四套电动舵机相互独立工作。实验结果表明,控制器可以正常工作,舵机带宽可达到25Hz。
本文引用地址:https://www.eepw.com.cn/article/201610/306589.htm舵机系统是导弹控制系统的执行机构,在导弹飞行过程中舵机控制器接收弹载计算机的舵偏角信号,控制电机旋转,从而驱动舵面偏转,产生弹体所需要的控制力矩控制弹体飞行。随着导弹性能要求不断提升,人们对于电动舵机系统的整体要求向着体积不断减小,承载能力不断增强,控制性能不断提高的方向发展。稀土永磁材料和新型大功率电子器件使电动舵机的小型化成为可能。本文舵机系统采用三相无刷直流电机+滚珠丝杠直连式结构。为了减小舵机的体积和重量,舵机系统采用一个舵机控制器控制四套舵机。控制器以DSP+CPLD为核心架构,DSP作为主控CPU,CPLD用于做接口处理,采用位置环和速度环进行双闭环控制。
1 舵机控制器硬件设计
舵机控制器硬件结构如图1所示。舵机控制器以DSP为核心控制器,用CPLD做逻辑处理,DSP和CPLD之间通过数据线、地址线和控制线相连。外部电路包括电源转换电路,电位计的AD采集电路,串口和CAN总线接口电路,霍尔信号和编码器信号接口电路,隔离驱动电路,三相桥式功率主电路。
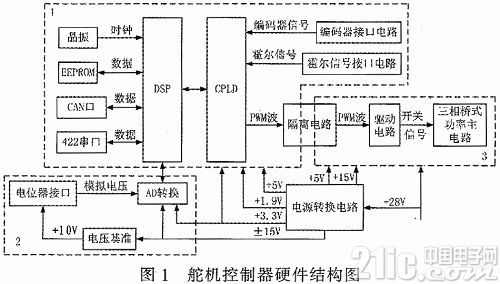
舵机控制器分为功率电路、数字电路、模拟电路3部分。图1中虚框1为数字电路部分,虚框2中为模拟电路部分,虚框3中为功率电路部分。舵机控制器的功率地和弹上热电池的地是共在一起的,通过两个隔离的DC—DC模块分别将数字地和模拟地与功率地进行隔离,数字地和模拟地通过磁珠单点连接在一起。
电源转换电路将弹上热电池的28 V电压转换成舵机控制器上数字电路部分所需的+5 V、+3.3 V和+1.9 V,模拟电路部分所需的±15 V,功率电路部分所需的+5 V和+15 V。
DSP为整个控制系统的核心,完成电位器AD采样的控制,系统保护、控制算法的实现和通信等任务。TMS320F28335高速计算能力及丰富的内部集成模块,不仅简化了系统外围模块的设计,也降低了对这些模块支持的应用程序的编写难度,从而使系统的集成度、可靠性得到提高。由于整个系统多达4个舵机,有 12路霍尔信号和12路编码器脉冲信号,因此外加逻辑器件来实现逻辑仲裁和脉冲信号的采样,CPLD型号为Altera公司的EPM1270,CPLD主要完成速度环的采样和PWM控制信号的生成。编码器输出信号为差分信号,通过TI公司的芯片SN65175D转换为单端信号,再通过电平转换芯片 SN74LVC4245与CPLD相连,在CPLD内完成对编码器输出脉冲个数的计数,通过数据线、地址线和控制线与DSP进行通信,完成系统对电机速度信号的采集。三路霍尔信号与DSP输出的PWM信号以及方向信号在CPLD内进行逻辑组合,得到驱动舵机电机所需的六路驱动信号。
舵机系统采用电位器检测位置信号,与舵机输出轴相连的电位器由电压基准芯片MAX6176提供+10V的压基准,电位器输出抽头部分的电压经由运算放大器 INA128构成的射极跟随器后通过AD转换与DSP相连。DSP自带的12位的AD无法满足系统位置分辨率小于0.001°的要求,所以外扩一个16位的AD转换器,型号为AD公司的AD7606。
主电路与控制电路之间通过磁耦进行隔离,隔离芯片型号为ADUM1401,驱动芯片采用IR公司的IR2136,它由单电源供电,工作频率可达十万赫兹以上,具有强大的欠压和过流保护功能。
舵机控制器的通信接口包括CAN总线接口和隔离式RS-422串口。CAN总线接口用于调试使用,驱动芯片选择TI公司的SN65HVD230。隔离式 RS-422串口用于与弹上其他设备进行通信,驱动芯片选择AD公司的ADM2582。为了能够在线配置系统参数。利用DSP的SPI接口外扩了 EEPROM芯片。
通过以上设计,控制器可实现舵机的自动控制与对外通信等功能。
2 舵机控制器软件设计
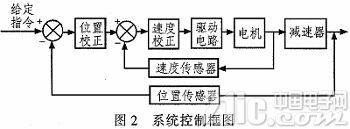
舵机控制器能够实现位置外环和速度内环双闭环控制,舵机的控制系统框图如图2所示。
舵机控制器软件包括DSP部分的程序和CPLD部分的程序。控制主程序在DSP完成,CPLD完成编码器脉冲的计数和PWM控制波的生成。DSP内程序主要完成以下工作:
1)通过RS-422总线接收并解码弹载计算机发出的控制指令,并发送舵偏角反馈指令给弹载计算机;
2)对位置、速度传感器数据的采集与处理;
3)控制律计算;
4)生成PWM波。
根据、DSP内程序的主要功能,DSP内程序由以下几部分组成:
1)初始化模块;
2)数据采集与处理模块;
3)控制律计算模块;
4)PWM波生成模块;
5)串口通信模块。
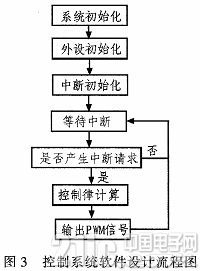
舵机控制器的软件流程图如图3所示。
3 实验结果
根据导弹技术指标要求,电动舵机技术指标如表1所示。
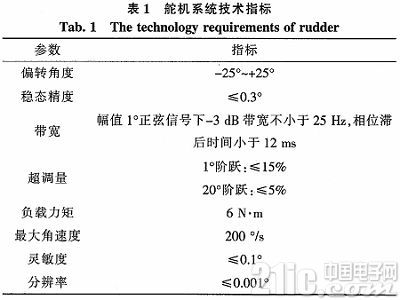
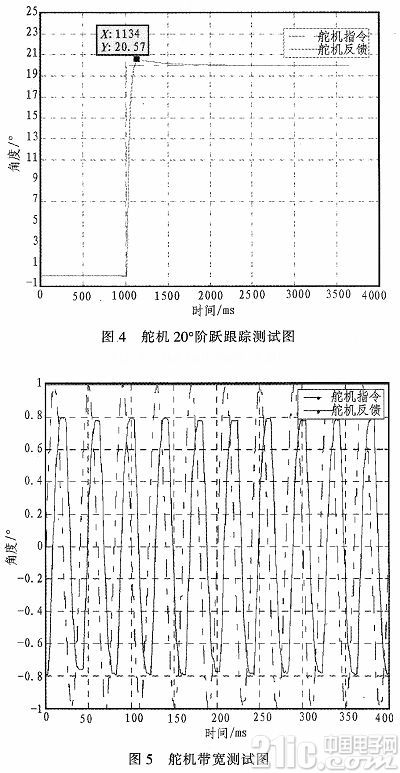
舵机系统采用三相无刷直流电机+滚珠丝杠直连式结构,减速比为143。舵机跟踪20°阶跃信号结果如图4所示,超调量小于5%。舵机跟踪1°25 Hz正弦信号结果如图5所示,跟踪幅值衰减到0.8°,大于0.707°,延迟时间为8 ms,小于12 ms。图4和图5中虚线为位置指令,实线为舵机实际跟踪曲线。
4 结论
实验结果表明,电动舵机系统的性能指标达到技术指标要求,本文所设计的以DSP+FPGA为核心的一控四舵机控制器设计合理,工作可靠,减小了舵机系统的体积和重量,可以应用于导弹舵机系统当中。











评论