基于ARM的车辆工况信息采集终端的设计

摘要:为能对野外作业的车辆实时定位并精确把握其工作状况,本文在深入研究GPS定位、CAN总线和GPRS数据无线传输等技术的基础上,设计了一款基于ARM处理器的车辆工况信息采集终端。该终端可实时获取车辆位置信息、定时读取车辆工况信息并实时上传至远程监控中心,同时具备人机交互界面和语音通话功能。试验测试表明,该车辆工况信息采集终端运行稳定,达到了预期效果。
本文引用地址:https://www.eepw.com.cn/article/201609/303579.htm关键词:车辆工况信息采集终端;ARM;GPS定位;CAN总线;GPRS
近年来,随着国III标准的强制执行,为达到该标准对柴油机燃油经济性和排放效果的要求,电子控制技术在柴油机控制中得到快速应用和发展。为能实时监测以电控柴油机作为主要动力的机车的位置和运行状况数,本文应用GPS定位技术、CAN总线技术和GPRS数据无线传输技术,以基于ARM架构的 S3C4480X芯片作为核心处理器设计了一款可实时获取车辆位置信息、定时读取车辆工况信息并实时上传至远程监控中心的车辆工况信息采集终端。
1 终端主要技术研究
1. 1 GPS定位原理及定位信息的获取
GPS全球定位系统由24颗分布在6个倾角为55°的轨道上的卫星、5个卫星数据监测站3个卫星控制数据注入站和用户接收设备组成。GPS卫星实时发射调制了C/A码和P码的频率为1 575.42 MHz(L1)和1 227.60 MHz(L2)的高频载波信号。用户接收设备任意时刻可接收4颗以上卫星发来的L1载波信号并采用空间距离后方交会的方法,解算出用户接收设备所处位置。假设地面上的用户接收设备(坐标位置为x、y、z)于t时刻开始工作,并分别于t1、t2、t3、t4…时刻接收到距用户s1、s2、s3、s4…的坐标位置为(x1、yl、z1)、(x2、y2、z2)、(x3、y3、z3)、(x4、y4、z4)…等卫星发来的载波信号。通过对方程组:
(t1、t2、t3、t4…,s1、s2、s3、s4…,(x2、y2、z2)、(x3、y3、z3)、(x4、y4、z4)…等数据可从各卫星发来的报文中获取,c——光速)求解可得t时刻用户接收设备的坐标值。为提高定位精度,具体应用中,用户接收设备按照每组4颗的方式将所接收到的卫星信号分为若干组,分别进行求解,最后从解算结果中挑选误差最小的一组值作为最终结果。
用户接收设备将按照NMEA0183协议将最终结果打包成GPGGA、GPCSA、GPGSV、GPRMC、GPVTG和GPGLL7帧数据输出。
1.2 CAN总线技术
CAN总线是20世纪80年代德国博世公司为解决汽车上众多测量控制部件之间的数据交互问题而开发的一种串行数据通信总线,可有效满足分布式控制和实时控制的需求。
作为一种对等网络,CAN总线中各节点没有主从之分,同时CAN废除了传统的站地址编码方式,而代之以报文标识符对各节点报文进行标识并对各节点报文的优先级进行定义。CAN总线支持两种帧格式的报文:标准帧——有11位标识符;扩展帧——有29位标识符。为确保各节点能正确接收所需报文,CAN总线中的各节点通过其上的屏蔽码寄存器对总线上的各报文进行过滤以选择符合自身要求的报文。
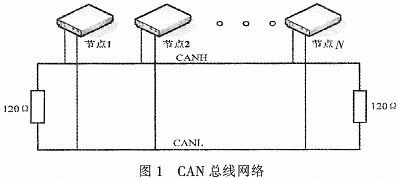
如图1所示为典型的CAN总线网络,在CAN网络中一般选用双绞线作为传输介质,双绞线的特性阻抗一般为120欧。具体设计中,为防止总线上的信号在传输过程中因阻抗不匹配而在网络终端发生反射并与后面的信号叠加形成驻波,进而影响总线信号的传输质量,通常会在CAN总线网络的两端并联两个阻抗值为120 Ω的电阻,用于阻抗匹配。
1.3 GPRS数据无线传输
GPRS通用分组无线服务技术,是GSM网络的延续。GPRS利用GSM网络中未使用的TDMA信道,增加了分组控制单元(PCU)、服务支持节点 (SGSN)和网关支持节点(GGSN)等实体部件,并对GSM网络基站系统的相关软硬件进行更新升级,最终实现数据的分组传输。
GPRS采用分组方式进行数据传输,即在GPRS网络中,只有在用户需要进行数据交互时,才临时为用户分配一个可用信道,数据传输结束后,立即收回该信道,数据的发送接收端同信道没有固定的占用关系。这样可实现信道资源的最大化利用。
2 终端整体架构
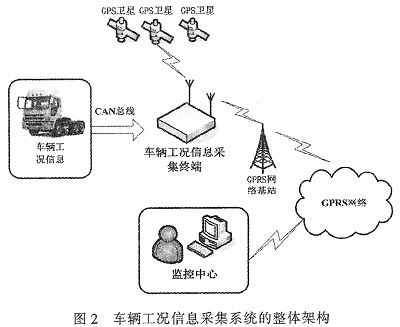
如图2所示为车辆工况信息采集系统的整体架构。车辆工况信息采集终端实时获取GPS卫星传来的数据报文,并解算出车辆位置信息;同时通过CAN总线定时读取车身上的ECU、TCU等控制器传来的反应车辆运行状况的信息;之后对获取的车辆位置信息和工况信息按照标准的数据帧格式进行打包并通过GPRS网络上传给监控中心,同时监控中心可通过GPRS网络发送相关指令给车辆工况信息采集终端。
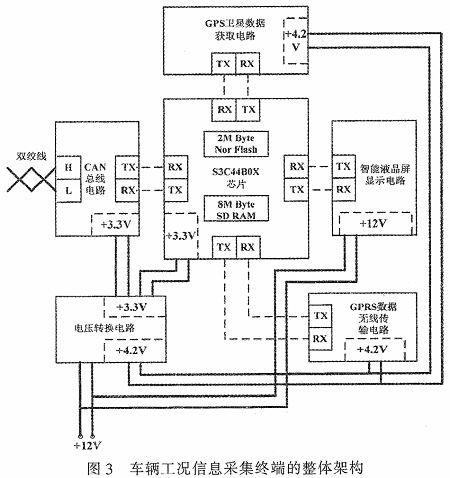
如图3所示为车辆工况信息采集终端的整体架构。来自车载电瓶的+12 V直流电源通过电源转换电路被转换为+3.3 V和+4.2 V的直流电输出。其中+3.3 V直流电用于向S3C 44BOX主控芯片和CAN总线电路供电:+4.2 V直流电用于向GPS卫星数据获取电路和GPRS数据无线传输电路供电;液晶显示电路直接由+12 V电源供电。GPS卫星数据获取电路通过串口将获取的车辆位置信息传送给S3C44BOX,S3C44B0X通过串口与CAN总线电路进行数据交互以获取车辆工况信息。同时S3C44B0X通过串口驱动智能液晶显示电路显示相关界面辅助用户操作,最后S3C44B0X通过串口向GPRS数据无线传输电路发送AT指令进行数据的无线发送,并通过该电路转接收监控中心发来的指令。
3 硬件电路的设计
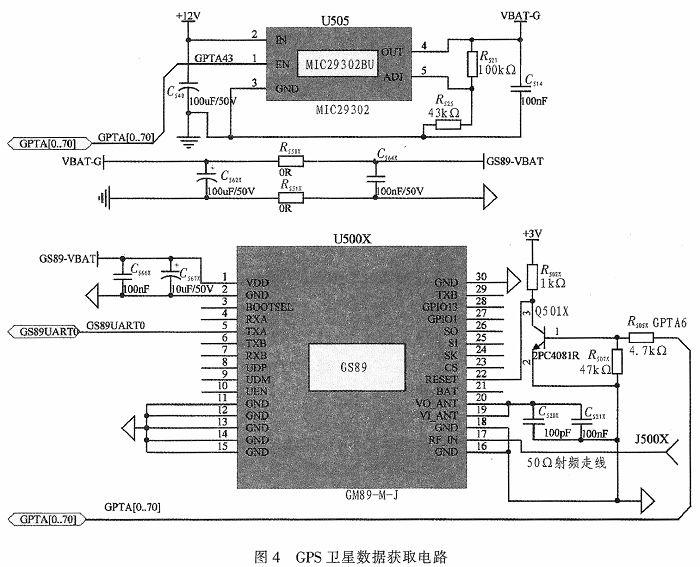
在车辆工况信息采集终端中,GPS卫星数据获取电路和GPRS数据无线传输电路的抗电磁干扰性能,直接决定车辆工况信息采集终端运行的稳定性和数据报文传输的准确率。











评论