单片机控制的负阻自激振动系统

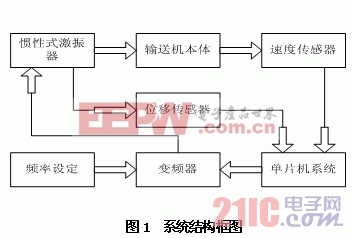
共振式输送机是采用惯性式激振器控制的机械振动系统,分为非振动式和振动式,前者:结构简单,制造方便,工作状态稳定,但功率消耗大。而后能耗少,但工作状态难调整,微小的频率漂移将引起很大的幅值波动。于是,在工程中常采用非共振式的。针对共振运行不稳定的问题,我们采用振动速度倒相信号的闭环反馈,即利用单片机进行采集和处理反馈信号,实现频率的自动跟踪[1],使系统处于平衡的共振状态。利用其共振的高效节能性,用小功率电机完成大功率电机所能完成的任务,对于大中型共振式机械节能优越性更为明显。该系统的结构框图如下:
共振式惯性输送机属于单自由度振动系统,由惯性激振器和机械振动系统组成,其力学简图如下:
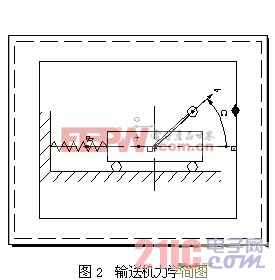
该振动系统的强迫振动方程为:
系统的工作过程及主要程序
(一)工作过程
1、搜索同步频率:由上节计算可知共振时变频器的频率大约在40Hz,因此让变频器的频率从35Hz~45Hz 以0.2Hz步进,记录振动体的振幅的幅值.由于机械装置的惯性,所以每增加到一个新的频率时应延时3个周期.
2、共振运行的控制: 在搜索到同频率以后,接着进行判断振动体运动到T/4的程序,即由ADC0802输入的电压由此及彼到最大的过程,在这过程中,单片机记时,则得到振动体的周期T。
同理测偏心块的角速度,由于8个接收二极管每隔450安装在偏心块的运动轨迹外侧,相邻二个接收二极管依次导通时间间隔是T/8,则单片机可记录此时间同上可得到Ω我们再来推倒Ω和控制电压u的关系:
3、输出电压的控制:
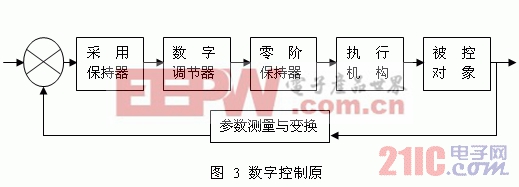
对偏心块的位置在一个周期T1进行四次检测,通过编码器分别在T1/4,T1/2,3T1/4和T四个时刻检测,其值与理论值z比较,若两者一致,则不作调整,不一致则按PID公式调整[2]。输入数字调节器的信号是经过“离散量化”后的信号,数字调节器的输出的信号必须给予“恢复”中的零阶保持器,担负着将离散信号恢复为连续信号的任务,才能对被控对象实施有效控制。下图为数字控制原理框图:












评论