光电跟踪伺服系统中模糊控制器的设计与仿真

引言:
近年来,人们广泛的将模糊控制技术应用于生产生活各个领域。它以其不依靠被控对象的精确数学模型、适应性好、系统鲁棒性好以及易于实现无超调控制[1]而受到业内人士青睐。尤其是二维模糊控制器,以其设计相对简单,控制精度较高而备受瞩目。本文在经典控制方法的基础上,加入比例因子自调整二维模糊控制器构成一种伺服控制系统模型,通过编写M文件的S函数来进行经典控制方法和模糊控制器之间的切换,仿真结果表明,光电跟踪伺服系统的动态性能有很大改善。
一、光电跟踪伺服系统的数学模型
光电跟踪伺服系统属于双闭环单输入单输出位置随动系统,内环为速度环,外环为位置环。本文针对的控制对象是光电跟踪系统转台,其传递函数是:
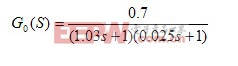
速度环和位置环的控制器利用超前-滞后补偿方法设计,闭环系统的主要组成环节可以参见参考文献[2],这里不再详述。
二、模糊控制器设计
控制系统工具箱(Control System
Toolbox)是MATLAB软件包中的专门针对控制系统工程设计的函数和工具的集合。该工具箱提供了丰富的算法程序以完成一般控制系统的设计、分析和建模。
SIMULINK是用来建模、分析和仿真各种动态系统的交互环境,通过SIMULINK提供的丰富功能块,可以迅速地创建动态系统模型。模糊逻辑工具箱,利用基于模糊逻辑的系统设计工具,通过GUI,可以完成模糊控制推理系统设计的全过程,利用简单的模糊规则对复杂的系统行为进行建模,然后将这些规则应用于模糊推理系统;S函数是SIMIULINK提供的一种功能强大的编程机制,通过S-function用户可以实现用户自己的算法。
1、模糊控制输入变量的设计和选择
系统中的模糊控制器采用双输入单输出型控制器。输入变量为偏差信号E和偏差变化率EC。输出变量为控制量U。E、EC、U的量化论域均为(-6
6),模糊子集均为{NB,NM,NS,ZO,PS,PM,PB}。在MATLAB主界面命令窗口中键入FUZZY命令,将进入模糊控制器的图形用户界面FIS编辑器,分别建立E、EC、U的隶属度函数。这里选用三角形(trimf)隶属度函数。
2、模糊控制规则的建立
模糊控制规则有两种方法:经验归纳法和推理合成法,本文中采用的是经验归纳法。
模糊控制规则的建立遵循以下原则:
当偏差为正向较大且偏差变化为正向较大时,控制量U的输出应为正向较大;
当偏差为正向较小或零且误差变化为正向较小或零时,控制量U的输出应为正向较小或零;
当偏差为负向较小且误差变化为较小时,控制量U的输出应为负向较小;
当偏差为负向较大且偏差变化为负向较大时,控制量U的输出应为负向较大;
……。










评论