光电跟踪伺服系统中模糊控制器的设计与仿真
在FIS编辑器中设计模糊控制规则,如表一所示:
本文引用地址:http://www.eepw.com.cn/article/169473.htm

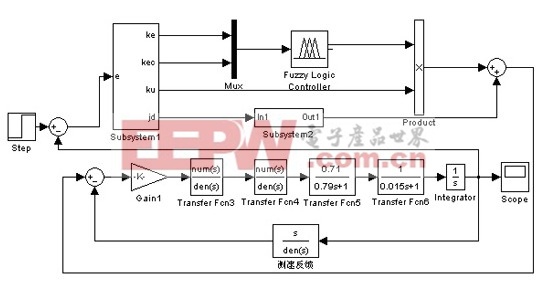
如图一所示,光电跟踪伺服系统是双环随动系统,他由速度环和位置环构成,在位置环上,模糊控制器和常规经典控制器被设计成按系统偏差大小进行分段控制。
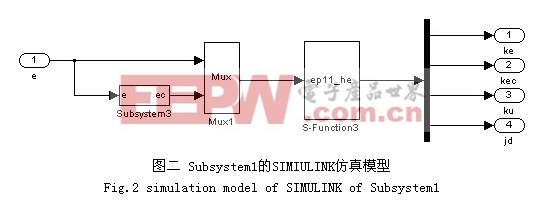
Subsystem1子系统如图二所示,偏差E和EC是S-函数的两个输入,S-函数的输出是比例因子Ke、Kec和Ku还有位置环常规控制器的输入jd。
应用S-函数ep11_he.m能实现两种控制器之间的切换,切换点选取为0.1。当系统偏差绝对值大于切换点时,为模糊控制器工作,使系统偏差迅速减小;小于切换点时,Subsystem1子系统的jd端口输出为e,常规控制器控制工作,保证系统控制精度[3]。ep11_he.m对模糊控制器的两个输入E和EC的比例因子Ke和Kec进行配置。由于比例因子Ke和Kec的取值对光电跟踪伺服控制系统的动态性能影响很大。Ke选取较大,系统的超调量也较大,过渡过程较长,但上升时间变短;Kec的取值越大,系统超调量越小,但系统的响应速度变慢,同时,模糊控制器输出比例因子Ku选择过小将导致动态过程变长,过大又会使系统振荡[4]。按照这一规律(经过仿真试验验证),在S-函数ep11_he.m中,特别将两个输入E和EC分别与两个输入比例因子Ke和Kec联系,使Ke和Kec随着E和EC的变化而变化,当偏差较大时,Ke取较大值,系统上升时间变短,响应速度较快;当偏差较小时,Ke应为较小值,使系统超调下降;同样,对于偏差变化可以使之与EC建立联系,在系统响应的上升时间里,保持较大值,以减小系统超调量;当EC较小时,Kec的值迅速减小,系统保持较快的响应速度。ep11_he.m中对于Ku的取值原则,在系统响应的上升状态中,使Ku取较大的值,减小系统的动态过程时间;当系统E和EC比较小时,Ku取较小的值,避免系统振荡。















评论