矿山机车无速度传感器矢量控制系统

现代轨道牵引中,异步电机已经逐步代替直流电机而成为主要的轨道牵引用电机种类。为了得到较好的交流调速性能,矢量控制是一种较为理想的控制方法。对于矿山机车牵引系统,为获得较好的控制性能,应针对矿山机车的工作特点对传统的矢量控制系统进行改进。机车运行条件恶劣,震动强烈且工作环境灰尘多,这些条件对速度传感器会有很大的危害。所以机车在某些情况下不能使用速度传感器,在系统设计时要考虑实现无速度传感器运行,利用电压电流等电量信息估算出电机转速。此外在很多情况下要求机车电机在大于额定转速工作时仍然有足够的转矩输出。所以系统在设计时必须设计合适的弱磁控制算法,以保证电机在额定转速以上的正常工作。
本文首先针对矿山机车的工作特点,设计了相应的矿山机车矢量控制系统,然后对系统中的基于模型参考自适应(MRAS)方法转速估算环节进行了分析研究,此后重点对系统的弱磁环节进行了分析研究,比较分析了传统弱磁控制策略和考虑电机电压电流约束的优化弱磁控制策略。设计并制作了一套基于TMS320F2812控制器的电机控制系统,在此系统上完成了基于MRAS方法转速估算环节和弱磁环节的实验验证。
2.矢量控制原理及系统设计
异步电机本质上是一个高阶、非线性、强耦合的多变量系统,由于电机内部各个量的耦合性的存在,直接控制电机的三相输入电压电流的方法得到的结果并不令人满意。经过合适的坐标变换,电机内部电流将会得到解耦,电机的模型将被大大简化。在常用的磁场定向矢量控制系统中,一般使d-q坐标系中的d轴与转子磁场方向重合,此时转子磁通q轴分量为零,在此坐标系内电机模型如下:

由转矩方程可知,此种坐标系的选择方法可以实现电流解耦,从而对转矩和励磁电流分别控制,获得较好的控制性能。
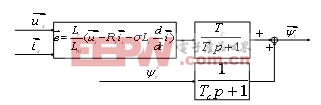
由上面矢量控制的原理可知,异步电机的矢量控制系统就是先对实际电机的三相坐标系下的物理量进行变换,在变换后的坐标系下对电机的磁链和转矩分别控制,确定控制给定量,然后再经过反变换变换至实际三相坐标系系统对电机进行控制的过程。针对前面所提到的矿山机车牵引电机的工作特点,应该在传统的矢量控制中加入转速估算和弱磁控制环节。综合考虑矿山机车系统的特殊要求本系统结构框图如图1所示。

3.基于模型参考自适应(MRAS)方法的转速估算
无速度传感器矢量控制需要准确的估算磁链和转速信息。传统的电压模型法、电流模型法等开环磁链观测方法都存在着观测精度和稳定性不足的问题,而且这些观测器仅能估算出磁链信息,对于转速信息则需要其他估算方法,系统较为复杂。为解决此问题,模型参考自适应(MRAS)方法提供了一个很好的思路,通过选择合适的参考模型和参数可调模型,可以同时观测出电机的转速和磁链信息。
对于矢量控制系统,根据两相静止坐标系下异步电机的数学模型可以得到两种形式的磁链估算模型:
电压模型

可见两个模型的输出均为电机磁链,由于在电压模型中没有转速项,所以可以选用电压模型作为参考模型。电流模型作为参数可调模型,转速作为可调参数,根据Popov超稳定性理论,选取误差量为

选取比例积分自适应率,即可求得角速度,辨识公式为:

这样利用模型参考自适应方法就可以同时获得电机的磁链和转速信息,一定程度上简化了系统的结构。MRAS是基于观测器的稳定性设计的辨识方法,它保证了参数估计的渐进收敛性。由于MRAS的观测器是以参考模型为基准的,参考模型本身的参数准确程度直接影响到速度和磁链辨识的精度。为消除电压模型中纯积分的影响,可以对电压模型进行改进:利用一阶惯性环节代替对反电动势的纯积分环节,惯性环节所引进的状态估计相位滞后由参考转子磁链的滤波信号来补偿。本系统中所采用的改进的电压模型如图2所示:
改进后的模型仍然存在低速时估算精度较低的问题,在矿山机车牵引系统中低速工作情况较少,所以此模型适用于机车牵引电机控制系统。
4.弱磁控制
在实际系统运行过程中,磁场电流和转矩电流不能任意给定,必须考虑各种约束条件以保证电机的正常运行,避免过热过流及运行不稳定等问题。系统中逆变器的输出电压存在极值,在SVPWM调制策略下,其输出的最大相电压幅值为,其中为直流母线电压。逆变器的输出电流以及电机所能承受的电流也是有限的,存在最大输出电流限制。控制时应保证电压限制,电流限制,由矢量控制原理可以推得稳态下电压关系,其中为同步转速,为电机瞬态电感,分别为电机的定子、转子以及励磁电感。可见在忽略电阻压降时,电机的端电压近似正比于磁链和速度之积。当电机的转速大于电机的额定转速时,若保持磁链为额定磁链不变而提升电机转速,会导致最大转矩电流减小,影响电机的转矩输出能力,为了避免这种情况最直接的方法就是再增加转速的同时削弱电机内部磁场强度,降低励磁电流从而控制电机的端电压维持在额定值。
基本弱磁控制
由于在电压约束表达式中,所以在转速超过额定转速后令,其中为额定同步转速,为当前电机同步转速,为额定励磁电流。这样可以保证维持电流所需的电压基本恒定,不会随转速升高而明显上升。为了方便工程实现,常用电机的转子速度代替。由于电机转矩与乘积成正比。此时随着转速的上升,电机的输出转矩会随速度的反比降低,电机的输出功率恒定,这就是基本弱磁控制。此种控制方法下,电机的转矩和功率输出如图3所示。

此种方法不受电机参数的影响,便于工程实现,但是没有考虑全部电机运行约束的限制,无法合理分配电流以使转矩最大化,而且由于电机内部,所以此算法无法保持励磁电压恒定,励磁电压会随着转速的上升而不断增大,可能导致电流无法有效跟随,影响运行稳定性。











评论