洗碗机水泵无传感器PMSM驱动设计

由于PMSM中没有换向器(即电刷),因此电机控制技术必须基于对转子位置的了解。该位置必须是可测量或可估计的。测量转子位置要求在电机轴上安装光编码器(传感器)等设备,而这样做会大幅增加系统成本。如果可以用一个有效的方法估算转子位置,那么就可以不使用传感器。根据电机运转状态(零速度、低速、高速等)的不同,用来估算转子位置的方法有很多种。电机高速运转时,可以利用观测仪就低角误差、动态性能、错误过滤等方面获得良好结果。本文描述的解决方案使用的是“反电势观测仪”,它基于电机的数学模型。
用来驱动PMSM的高性能技术基于磁场定向控制(FOC),有时简称为“矢量控制”。这种方法的目的,是无论机械负载转矩变化和其他干扰如何,都能够以精确追踪命令轨迹的方式独立控制气隙中的电机转矩和磁链,并实现尽可能快的瞬时响应。FOC方法加上估算转子位置的反电势观测器,是驱动基于 PMSM洗碗机水泵的理想解决方案。
洗碗机水泵
家电制造商最近已经开始使用PMSM来驱动洗碗机水泵,典型参数包括:
C 230V的线路电压(欧洲)
C 6或8个磁极
C 80W额定功率
C 在d、q轴下定子相位等效电感Ld与Lq的关系为-Ld=Lq
洗碗机水泵控制算法在闭合的电流和速度环路中运行。洗碗机内的水压用液压系统(水管、喷水器等)的物理设计来表示,可以通过变换水泵的速度进行控制。
典型的洗碗机水泵运行特性包括103kPa(15psi)至827kPa(120psi)的水压范围和1,500rpm至3,500rpm 的机械泵速度。
PMSM电机控制方法
驱动PMSM的比较适合的控制方法有数个。根据应用性能和成本要求,本节描述的矢量控制方法(也称为FOC)比较适当。FOC控制方法的基本原理如图1中所述。
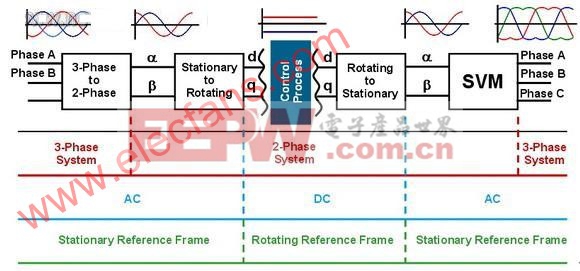
图1:FOC控制方法原理
矢量控制方法的必要信息包括转子的位置和速度,以及电机磁化磁链的位置。传统运动控制系统使用解析器或编码器。这样,监控转子所需的传感器、配线和连接器就增加了系统成本,降低了可靠性。对于成本敏感型应用,必须以其他方式获取转子位置。不采用位置传感器的算法称为“无传感器控制”方法。图2中的框图显示了实施的无传感器矢量控制算法。位置和速度采用反电势观测仪及追踪观测仪进行估算,如图所示。
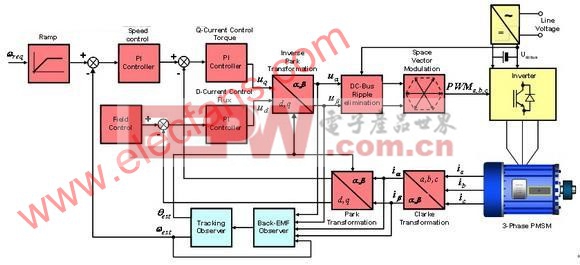
图2:PMSM矢量控制算法框图
电机是一个动态系统,因此我们用一组微分方程式对其进行描述。alpha/beta静止参照系中的定子电压方程式可表达如下:



该数学模型描述了该洗碗机水泵应用中使用到的PMSM 的行为,因此它可用于反电势观测仪。
转子位置和速度估算
一般来说,“estimator”是一个估算状态变量的动态系统。estimator实施从根本上说有两种形式:开环和闭环。在闭环estimator情况中,估算值和实际状态变量之间的误差作为校正项,调整响应。闭环estimator也称为观测仪。
反电势观测仪基于对电动势的估算。反电势模型包括来自传统反电势(转子磁铁)的感应电压和来自定子电感的感应电压。这让我们能够通过对反电势的估算来估计转子位置。这种方法在低速时有一定的局限性,因为反电势信号非常弱,几乎为零,而且观测仪发散。当达到有效估算所需的最低运算速度时,反电势观测仪估算转子位置,可将其作为矢量控制算法的反馈信号。正确的观测仪运算的最低运算速度(电压)阈值取决于电机构造,必须根据电机参数计算或直接在电机上进行测试。
观测仪算法处理从PMSM 数学模型中得到以下方程式:

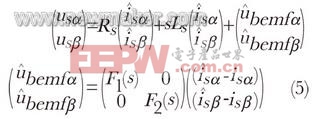












评论