洗碗机水泵无传感器PMSM驱动设计
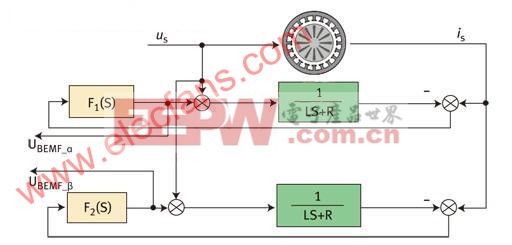
图3:反电势观测仪框图反电势观测仪输出两部分:( )和(
)和( )。这两个信号生成关于转子位置的信息。转换成转子轴角度的转子电气位置,可以由来自扩展反电势估算的两个输入的反正切函数决定。这种方法产生转子角度未过滤值,没有速度信息。
)。这两个信号生成关于转子位置的信息。转换成转子轴角度的转子电气位置,可以由来自扩展反电势估算的两个输入的反正切函数决定。这种方法产生转子角度未过滤值,没有速度信息。
估算转子位置和速度的另外一个广泛使用的方法是众所周知的角度追踪观测仪。通过采用角度追踪观测仪,位置估算的噪音可以被过滤掉。角度追踪观测仪算法的另外一个优势是:作为算法一部分,它还会估算出转子速度。图4描述了角度追踪观测仪的结构。
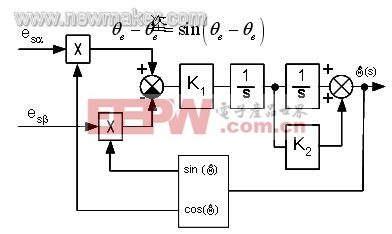
图4:角度追踪观测仪框图控制算法实现
以反电势观测仪和角度追踪观测仪为基础且带有转子位置和速度估算算法的矢量控制方法,目前已经通过飞思卡尔的MC56F8006得以实现。
有三条控制环路控制速度、转矩、磁链。控制算法在优先的中断服务程序中执行。内部控制环路最为关键(q轴电流和d轴电流),每125μs执行一次。外部控制环路(速度)每1ms执行一次。内部控制环路不可中断,这点可以通过为其分配适当的高中断优先级得以保证。这种方法简化了应用框架设计,允许中断程序优先级由处理器自动管理。矢量控制算法处理以下模拟信号:
C 三个电机相电流(ia、ib、ic)。这些信号通过安装在三个逆变电路底部的三个并联电阻进行测量。
C DC总线电压。
在任何给定实例中,只测量三个相电流中的其中两个,计算第三个。当接通相应的底部晶体管,可以在并联电阻器上看见电流。可以在其中测量电流的窗口依赖生成的PWM控制信号占空比,因此需要在适当且精确的瞬间开始ADC转换流程。借助MC56F8006 DSC中特别设计的硬件,可以圆满完成这一艰巨任务。PWM模块生成的可配置同步脉冲,可以输入到可编程时延块(PDB)中。之后,同步脉冲由PDB模块进行处理,输出直接触发ADC模块,实现对ADC测量的精确同步控制。这种同步机制由硬件进行处理,没有任何软件干预。软件只需要读取ADC结果寄存器。这里描述的应用使用这一功能,每125μs转换6个模拟信号。ADC模块包含两个独立的12位ADC转换器,在经过配置后可以依次、同时或并行运行。要进行相位电流取样,使用同时运行模式同时在两个相位上进行ADC测量。这样就实现了精确的瞬时测量,三个相位电流都可以从该测量中提取。
由于反电势观测仪不从零速度开始运行,转子通过驱动电机达到已知状态(相位)进行校准,这样我们就了解了初始转子位置。然后使用开环启动算法,将电机加速到反电势观测仪能够提供精确反馈结果的速度。从开环启动到闭环控制的切换平稳进行。
洗碗机水泵解决方案的运行图如图5所示,基于飞思卡尔MC56F8006的逆变器如图6所示。
图5:运行洗碗机泵演示

图6:采用飞思卡尔MC56F8006器件的三相逆变器












评论