微阵列加速度传感器的设计理论

建立引信系统环境识别(如多向加速度)与参数估计的多维信息处理理论产生新的引信原理是当前重要的研究方向。如对硬目标的侵彻或贯穿装甲所使用的巡航导弹、激光制导炸弹等,都存在多向加速度的探测问题。因此大量程的能测量105 g微加速度计具有非常重要的应用价值。目前微阵列式加速度计发展非常
迅速,它对提高武器作战水平,改进武器性能起着十分重要作用。另外汽车上的安全气囊,在微机器人中,执行器动作的运动速度、加速度和力的大小的检测都需要微阵列式加速度传感器。因此微阵列式加速度传感器的应用范围广,前景十分看好。
随着集成电路平面加工工艺技术日趋成熟,微加工中的三维加工工艺不断地发展,使微传感器、微马达、微泵等制造已成为现实。文献[1]曾提出了传感阵列的布阵设计问题,但未展开研究。本文在文献[2~4]的研究基础上系统、综合地研究了微阵列式加速度传感器,根据理论研究和实验分析,应按加速度值的大小进行微阵列式加速度传感器的研制。
微阵列加速度传感器的设计理论
加速度的影响因素与加速度之间呈现某种关系,应用多元回归理论研究加速度场的数学模型,当其关系是线性时,应用线性回归理论研究,建立数学模型及其评估方法,而为非线性时,应用非线性回归理论
研究,建立数学模型及其评估方法。
1.1 线性回归分析
设加速度Y与其影响因素X1, X2,…, XP存在线性关系,则其数学模型为
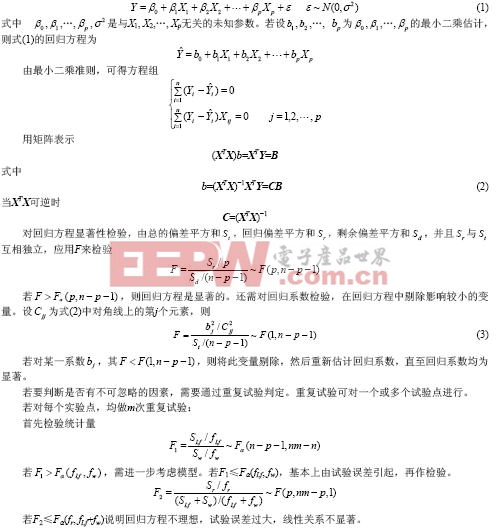
据此,可应用逐步线性回归的方法,将因子一个个地引入,引入的条件是该因子的偏回归平方和经检验是显著的,同时,每引入一个因子,要对老因子逐个检验,将偏回归平方和变为不显著的因子剔除。
逐步线性回归算法流程如下:
1) 设定函数FunInitial( )是输入的实验数据建立结构矩阵X、观察值矩阵Y、自相关系数矩阵R、常数矩阵B、增广矩阵R(0),并且设置相应的初始化值,函数FunAssesGet( )引入因子时,计算偏回归平方和及检验的函数;2) 函数FunAssesPel( )引入一个因子后,做剔除旧因子的检验函数;3) 数组均用首元素表示当前已被使用的数组数目;4) 数组Already Trans Row [n]记录已经被检验过,放入回归方程中的因子下标;5) 整数
变量L用来计数,对n-1次可能的引入因子的处理加以限制;6) 整数变量T, rausRow表示当前要进行R矩阵变换的行,当其值为−1,表示没有转化的行,程序最终输出有效的回归方程。
1.2 非线性回归分析
当测试加速度与影响因素呈非线性关系,则需建立非线性模型,并应用阻尼最小二乘法解决。
1) 非线性回归数学模型及分析方法
假设函数

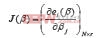 同时对阻尼因子的调整作了研究,使阻尼的确定和计算速度满足实际应用的要求。
同时对阻尼因子的调整作了研究,使阻尼的确定和计算速度满足实际应用的要求。

pid控制器相关文章:pid控制器原理










评论