基于单轮车辆悬架的Fuzzy-PID控制器设计和仿真

摘要:研究车辆主动空气悬架的控制问题,在车辆主动空气悬的常规PID控制器的基础上,运用模糊推理对常规PID控削器进行参数在线修订,设计了基于单轮车辆主动空气悬架的Fuzzy-PID控制器,并对Fuzzy-PID控制的单轮车辆主动空气悬架进行Matlab建模和仿真试验。仿真结果表明,与车辆被动空气悬架、常规PID控制的车辆主动空气悬架相比,Fuzzy-PID控制的车辆主动空气悬架可大大降低车身加速度和悬架动行程,提高车辆乘坐舒适性和操纵稳定性,具有良好的鲁棒性,从而验证了Fuzzy-PID控制器的有效性和实用性。
关键词:车辆工程;汽车行驶平版性;模糊控制;Fuzzy-PID控制器;主动悬架
随着高速公路的日益发展,人们对汽车高速行驶时平顺性和安全性的要求越来越高。良好的车辆悬架系统可以有效地降低由于路面不规则激励造成过大车体加速度,使车辆具有良好的行驶平顺性和安全性。自主动悬架的概念提出以来,人们已经探求用各种控制理论算法设计主动悬架控制器。研究其在提高设计主动悬架中的应用效果。
模糊逻辑基于人类模糊思维这一抽象机理,它强调的重点是应用的简单和方便。自20世纪60年代,模糊数学的建立为模糊推理系统尤其是模糊控制系统的应用奠定了理论基础。目前,模糊推理系统已成功应用于自动控制、数据分类、决策分析、专家系统以及计算机视觉系统之中。
本文研究车辆主动空气悬架的控制问题,在车辆主动空气悬的常规PID控制器的基础上,运用模糊推理对常规PID控制器进行参数在线修订,控制策略融合了PID控制和模糊控制的优点,设计了基于单轮车辆主动空气悬架的Fuzzy—PID控制器,并对Fuzzy—PID控制的单轮车辆主动空气悬架进行Matlab建模和仿真试验。仿真结果表明,与车辆被动空气悬架、常规PID控制的车辆主动空气悬架相比,Fuzzy—PID控制的车辆主动空气悬架可大大降低车身加速度和悬架动行程,提高车辆乘坐舒适性和操纵稳定性,具有良好的鲁棒性,从而验证了Fuzzy—PID控制器的有效性和实用性。
1 单轮车辆主动悬架和路面激励
设计车辆悬架系统时,可把单轮车辆主动悬架模型(即单轮车辆模型)简化成一个弹簧-阻尼系统,该系统的力学模型如图1所示。
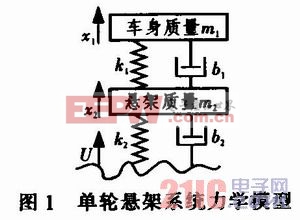
单轮车辆主动悬架的数学模型为:

式中,m1为车身质量,m2为悬架质量,x1为车身垂直位移,X2为悬架垂直位移,U为路面激励,k1和k2为弹簧胡克系数,b1和b2为阻尼系数。
路面不平度随机激励为:
![]()
式(3)中:no为参考空间频率,Gq(no)为参考空间频率下的路面功率谱密度,w(t)为白噪声。

pid控制器相关文章:pid控制器原理










评论