采用光电传感和路径记忆的智能车导航系统设计

基于路径记忆算法的转向及驱动控制策略,在电源管理、噪声抑制、驱动优化等方面也都进行了研究工作,通过大量的仿真试验、道路试验和基础性能测试,开发了基于光电传感和路径记忆的智能车导航系统,为整车系统的优良性能奠定了坚实基础。本文将从该智能车总体方案、路径识别方案选择、转向和驱动控制及路径记忆算法等方面进行介绍。
智能车总体方案
智能车系统以飞思卡尔公司的MC68S912DP256为核心,由电源模块、传感器模块、直流电机驱动模块、转向电机控制模块、控制参数选择模块、单片机模块等组成,如图1所示。智能车系统工作电压由+1.6V、+5V、7.2V三个系统混合组成,其中7.2V用于给驱动电机和转向舵机供电,5V给车速传感器、MCU以及光电传感器接收管供电,1.6V给发光管供电。为了在线控制参数的调整方便,还设置了一个控制参数选择模块,可以通过几个按键的设置,调用不同的程序或控制参数,以适应不同场地条件的要求。 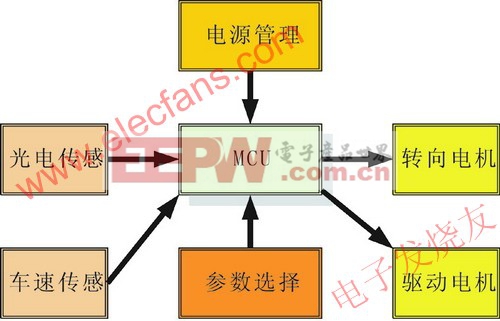
图1 智能车总体结构
智能车的工作模式是:光电传感器探测赛道信息,转速传感器检测当前车速,电池电压监测电路检测电池电压,并将这些信息输入单片机进行处理。通过控制算法对赛车发出控制命令,通过转向舵机和驱动电机对赛车的运动轨迹和速度进行实时控制。
想要取得智能车比赛的好成绩,模型车底盘参数优化和硬件设备的可靠性是非常重要的。其中,前轮定位参数优化、转向舵机力臂增大和底盘重心位置调整对于车模的机械性能有着较大的影响。底盘参数的优化参见,本文不赘述。
路径识别方案选择与电路设计
路径识别方案是首先需要确定的,主要有以下几个问题。
*光电识别还是摄像头识别;
*传感器如何排列?间隔多大、形状如何、单排还是双排;
*传感器可向前探测的远度;
*传感器信号采用数字式还是模拟式;
*电路上如何实现。
由于光电识别方案简单可靠,因此本文采用了光电识别方案。
数字式光电识别与模拟式光电识别
比赛组委会要求传感器个数最多为16个,除掉1个转速传感器,可用于探测路径的传感器为15个,而传感器允许布置的总宽度为25cm,如果采用数字式光电传感器均匀分布,对道路的探测精度只能达到17mm左右,这样赛车在前进过程中很难达到很高的控制精度和响应速度。从本质上讲,数字式光电传感器的劣势就在于它丢掉了路径探测中的大量信息。
模拟式光电传感器从理论上可以大大提高路径探测精度。模拟式光电传感器的发光和接收都是锥角一定的圆锥形空间,其电压大小与传感器距离黑色路径标记线的水平距离有定量关系:离黑线越近,电压越低,离黑线越远,则电压越高(具体的对应关系与光电管型号以及离地高度有关),如图2所示。 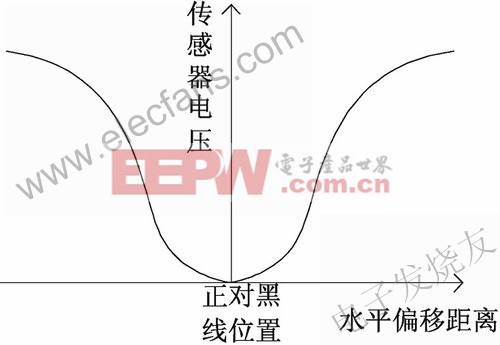
图2 传感器电压与偏移距离关系示意图







评论