采用ARM+Linux架构的基于CAN总线和MiniGUI的虚拟仪表设计

1 系统软硬件平台的选择
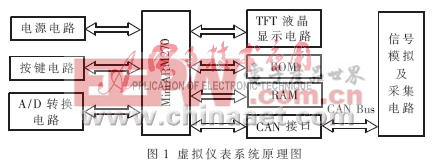
本文选取Intel公司的PXA270为微处理器,选配MiniARM270核心板;64 MB SDRAM为系统运行随机存储器;256 MB NAND Flash程序存储器;MCP2515 CAN控制器负责CAN报文的接收与发送;8英寸640×480真彩TFT液晶屏显示GUI图形界面;Linux为嵌入式操作系统[2]。选用目前较为流行的嵌入式GUI系统MiniGUI进行应用程序界面的编写。运用ZLG/BOOT启动Jflashmm、Flash FXP软件进行内核的烧写与移植。软件编制调试完毕后,进行操作系统内核定制,裁减出最小操作系统,并将应用程序与最小系统在仿真环境下进行联合调试。虚拟仪表系统结构如图1所示。
2 MiniGUI的程序开发和移植
将MiniGUI及应用程序移植到目标机上需要经历编写相应的驱动程序、交叉编译MiniGUI及应用程序、安装MiniGUI到目标系统、在目标系统上运行MiniGUI应用程序等几个步骤。
MiniGUI程序是建立在MiniGUI和ANSIC库之上,所以程序的编写要按照MiniGUI的程序框架来定,并通过调用ANSIC库以及MiniGUI自身提供的API函数来实现。MiniGUI程序的入口点: int MiniGUIMain(int argc,const cha r * argv [ ]) 。其风格类似于Win32 ,也是基于窗口、事件驱动编程。事件通过消息机制传递,当事件发生时,MiniGUI将事件转换为一个消息,并将消息发送到MiniGUI应用程序的消息队列之中。窗口过程函数是MiniGUI应用程序必不可少的函数,用于接收和处理消息,是一个回调函数,由MiniGUI调用,在应用程序中不能直接调用,其函数原型如下:static int WindowProc (HWND hWnd, int message, WPARAM wParam,LPARAM lParam)。每个MiniGUI应用程序的初始界面一般都是MiniGUI主窗口,然后在主窗口的基础上再建立子窗口或对话框等。主窗口使用CreateMainWindow函数实现,在这个函数里可以设置主窗口的风格、大小、句柄、标题以及窗口过程函数等[6,8-9]。
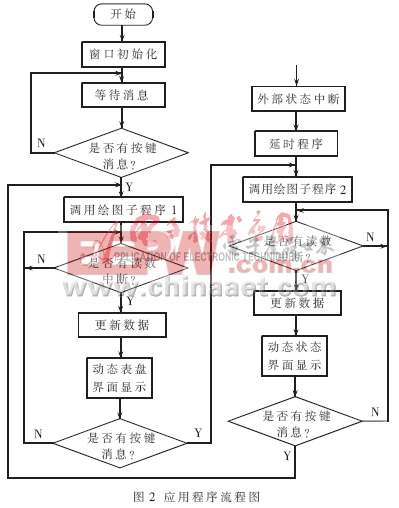
本文有两个显示界面,分别对应流程图里面的子程序1和子程序2。应用程序流程图如图2所示。
本文采用arm-linux-gcc-3.4.3交叉编译器对驱动程序和应用程序进行编译。安装交叉编译器步骤:将交叉编译器安装包arm-linux-3.4.3.tar.bz2复制到当前目录下,进行解压安装并指定安装路径:#tar xjvf arm-linux-3.4.3.tar.bz2 CC /usr/local/arm。为了便于使用,安装完毕后,通常都将交叉编译器的路径添加到系统的搜索路径中。这样要编译文件时就很简单,不用每次都指定路径,系统会自动搜索。在这里介绍的一种方法是修改/etc/profile文件:打开/etc/profile文件,在最后一行添加pathmunge /usr/local/arm/3.4.3/sbin,保存退出,在终端输入执行:#. Profile(“点+空格+文件名”)。可通过在终端输入:arm-linux-gccCv 检验用户编译器版本。arm-linux-gcc编译出来的程序,不能在PC机上运行,必须下载到ARM系统中才能运行。
MiniGUI在Linux系统中有两种运行模式:fbcon(Frame Buffer Console)和qvfb(Qt Virtual Frame Buffer)。fbcon在控制台下运行,这种模式下不能开Linux的X图形界面。qvfb则是带帧缓冲的虚拟控制台,MiniGUI程序在qvfb中运行就像图形界面下的终端(Terminal)中运行命令一样。通过对gal_engine赋值来设置运行模式。
3 信号采集电路
CAN总线的智能节点一般由主控制器、CAN总线控制器、CAN总线驱动器以及具体的功能单元组成。主控制器用来通过访问CAN总线控制器来实现对CAN总线的访问。CAN总线控制器实现CAN协议的数据链路层和物理层功能,对外具有与主控制器和总线驱动器的接口功能。CAN总线驱动器提供CAN总线控制器与物理总线之间的接口。










评论