基于DSP电动汽车无刷直流电机相位测试

摘要:根据无刷直流电机的工作原理,采用霍尔传感器作为位置传感器,TI公司的DSP芯片TMS320LF2406非常适合作为无刷直流电机(BLDC)的控制芯片,建立了无刷直流电机相位检测手段,转子位置检测模块的软件设计流程,简述电动汽车无刷直流电机控制系统的相位测试的硬件控制策略和软件设计方案。
关键词:无刷直流电机;电动汽车;霍尔传感器;相位测试
本文选用无刷直流电动机为电动汽车的驱动电机,DSP的TMS320LF2407A控制器为核心,霍尔传感器为位置传感器,转子位置传感器是无刷直流电机的关键部件,其作用是检测转子磁极相对于定子电枢绕组轴线的位置信号,为功率开关提供正确的开关信息,使电动机电枢绕组中的电流随着转子位置的变化而换相,从而使无刷直流电机正常工作。本文采用霍尔传感器为位置传感器,提出了一种获取无刷直流电机起转子相对于定子的位置信号相位测试的方法,导出了传感器信号和逆变器驱动信号的逻辑关系。
1 控制器总体方案
基于DSP实现的电机伺服系统可以仅用一片DSP就可以替代单片机和各种接口,扩展方便,可以实现位置、速度和电流环的全数字化控制,故控制电路采用DSP的TMS320LF2407A控制器为核心,采用该芯片设计控制器,只需要很少的外围芯片即可完成所有的控制任务。
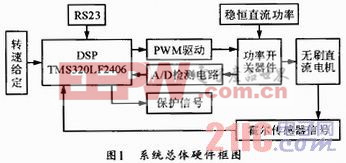
该控制器的硬件如图1所示,本文重点对无刷直流电机相位进行测试,基本上包括功率驱动部分、DSP控制核心部分、A/D信号检测部分等。
2 电机的工作原理及硬件实现
在BLDC中,转子每转动60°,霍尔传感器就会改变它的相,因此每个霍尔传感器的一个相代表一个具体转子位置。由霍尔模式(图2)知,信号由霍尔传感器产生,相应的转子位置对应着一个霍尔传感器。
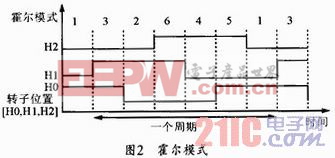
图3是三相无刷直流电机驱动控制使用霍尔传感器的结构原理图,使用了3个位置间隔120°分布的霍尔传感器,由霍尔器件所输出的转子位置信号送到功率变换电路后,直接送至TMS320LF2407A的捕获单元进行处理,每个霍尔传感器的输出与捕获单元的一个输入引脚相连,把捕捉口设置为I/O口,并检测该口的电平状态,就可以知道哪一个霍尔传感器的什么沿触发的捕捉中断。通过产生捕捉中断来给出换相时刻,同时给出位置信息,实现脉宽调制(PWM)和换相控制。
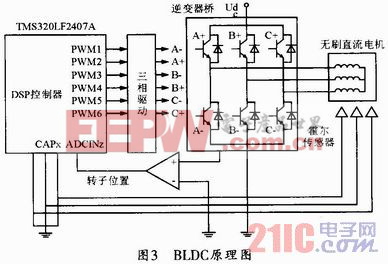
无刷直流电机控制系统通常采用两两通电方式,每一时刻只有2个上下桥臂的功率管导通,每隔60°电角度会换向一次。每一次功率管导通120°电角度,各功率管导通顺序依次为+A-B、+A-C、+B-C、+B-A、+C-A、+C-B,共六个状态。图3中功率变换器的六个开关元件IGBT的栅极驱动信号由DSP通过PWM1至PWM6引脚经过三相驱动电路隔离放大供给。其中,上桥臂的A+、B+、C+分别接受DSP的PWM1、PWM3、PWM5管脚的控制;下桥臂的A-、B-、C-分别接受DSP的PWM2、PWM4、PWM6管脚的控制。另外,位置传感器的三路位置输出信号H0、H1、H2经过施密特整形处理后分别给DSP的捕获口(CAPX)。霍尔传感器输出3个互相交叠180°的信号,通过检测输出信号的上升沿和下降沿,可以得到6个相位交变的时刻,同时发出中断信号,产生中断,调用相应的中断处理程序即可得到所需的位置信号。











评论