智能车模双电机差速控制的可行性研究

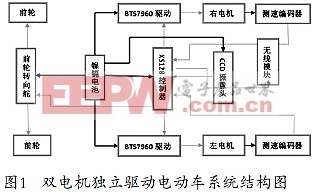
双电机独立驱动电动车的系统结构
本文引用地址:https://www.eepw.com.cn/article/142173.htm双电机独立驱动电动车系统结构,如图1所示。该电动车采用7.2V镍镉电池给电机供电,2台直流无刷电机分别直接安装在2个后车轮内,形成前轮转向、后轮驱动的方式。每台电机都有单独的控制器和测速系统,能够实时检测左右电机速度,整车控制器通过接收舵机转角、摄像头路况信息、电池、电机驱动控制器及车轮转速等信号,并根据内部控制策略,以高速平稳过弯为目标,通过控制器改变控制信号的PWM电压输出值,以此来控制2台电机的电压值,调节2台电机的转速,从而控制驱动车轮的转速。系统同时采用无线模块与上位机相结合的方式实时检测速度曲线,优化系统参数,以致达到更平滑的过弯效果。
基于转速调节的差速方案
方案介绍
要解决差速问题,最直观的就是控制两个驱动轮的转速,使其满足Ackerman模型的要求。
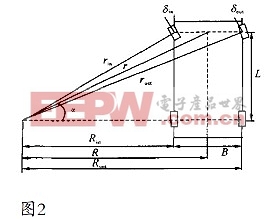
以图2所示的两轴车为例,阿克曼理论转向特性,是以汽车前轮定位角都等于零、行走系统为刚性、汽车行驶过程中无侧向力为假设条件的。该转向特性的特点为:①汽车直线行驶时,4个车轮的轴线都互相平行,而且垂直于汽车纵向中心面;②汽车在转向行驶过程中,全部车轮都必须绕一个瞬时中心点做圆周滚动,而且前内轮与前外轮的转角应满足下面关系式:
ctgβ-ctgα=K/L
式中:β为汽车前外轮转角,α—汽车前内轮转角,K为两主销中心距,L为轴距。
但是,该模型在理想条件下可行,而在实际系统中是不可能满足上述条件的。所以我们对该模型在算法上进行了相应的改进,在实际车模硬件电路设计中也尽量考虑减小机械因素的干扰。









评论