2026年,3DGS和世界模型,在自动驾驶仿真中的组合应用

2026年,自动驾驶仿真赛道将持续升温。
回顾2025年,两大仿真新技术快速走进公众视野,分别是世界模型(World Model)与3DGS(3D Gaussian Splatting,3D高斯泼溅)。
关于3DGS,我则一直觉得很神秘,因此特地做了一些探索,甚至申请到了商用软件来试用,因此本文就3DGS怎么嵌入到自动驾驶仿真流程中,做一些肤浅的探索。
一、3DGS与世界模型的路线差异3DGS和世界模型,听起来都很“高大上”。
虽然都是在做仿真,但在我看来是两种截然不同的技术路线。本文不谈公式和理论,我们尽量用通俗的语言快速理解其核心逻辑。
一句话总结世界模型:AI 构建的数字世界模拟器,复刻现实规律,能推演事件发展与结果。例如,向世界模型输入一段视频、图片或文字描述,它就能自动生成后续连贯的视频内容。
一句话总结3DGS:这是一种基于点云优化的3D高斯分布表征技术,可实现高保真动态三维场景的快速渲染。简单来说,它是一种革新性的三维建模技术——使用者只需手持扫描设备对目标物体或场景扫描一圈,就能直接生成对应的三维模型(过程如下图所示)。这种模型的细节纹理与真实世界高度贴合,使得整个仿真过程兼具高效性与逼真度,对传统三维建模技术形成了降维打击。

图片来源:视频号-扎克力
所以,你看出来了吗?3DGS与世界模型属于两条截然不同的技术路线。
3DGS是在传统仿真技术的基础上,对三维建模环节进行革新,属于“老树开新花”的迭代升级;
世界模型则走的是AIGC技术路线,通过直接生成所需仿真数据,完全跳过三维建模步骤,属于“大力出奇迹”的颠覆式创新。
前者,我愿称之为基于规则的仿真,rule-based simulation。
后者,我愿称之为基于端到端的仿真,e2e-based simulation。
没想到吧,智驾领域的技术路线之争,也在仿真赛道同步上演。
扯远了,还是来继续看看,3DGS到底能不能解决传统仿真技术中“自动驾驶感知仿真难”的痛点吧。
二、实操验证:aiSim软件的3DGS功能开箱体验感知仿真难,也就是传感器的仿真难。
自动驾驶最重要的三类传感器:摄像头、激光雷达、毫米波雷达。其中,激光雷达与毫米波雷达的感知置信度难以量化定义,因此本文以摄像头仿真为例,直观呈现3DGS在智驾仿真中的实际效果——毕竟摄像头仿真的逼真度,可通过肉眼做个简单判断。
此前我曾介绍过一些3DGS开源工具,但这类工具的易用性普遍欠佳。而在商用仿真软件中,目前已知仅aiSim搭载了3DGS功能。为此,我特意向康谋科技(原虹科自动驾驶事业部)申请了试用许可(license),完成了初步的开箱体验。

图片:aiSim仿真界面-GUI
作者寄语:使用aiSim的感觉和传统的仿真传感器类似,也是要创建地图,然后编辑场景,然后配置主车的动力学,配置各类传感器,外接自动驾驶算法,做场景泛化和大规模仿真等等。如果你已经掌握了一个仿真软件,那么迁移到这个软件应该是非常快的,像我,就是线下找aiSim的小伙伴,花了半天就感觉已经掌握它了(有点飘了哈哈),另外,aiSim也是支持xosc和xodr的,所有历史的场景库什么的迁移也是方便。
这些都不是重点,毕竟你有我有全都有,不值得说道。
但是,aiSim集成了3DGS的功能,让我着实觉得有点开眼界了。下面的软件界面,做了一个对比,一个是调用的传统手段建模的3D地图,一个是调用的3DGS建模的3D地图。结果就是,仿真效果肉眼可见的真实了不少。以前的仿真就像是放动画片似的,调用3DGS地图后,路面和外景等就更像是我们真实在道路上看到的效果了。

图片:aiSim仿真界面-手搓地图

图片:aiSim仿真界面-3DGS地图
以前觉得3DGS很神秘,但是使用软件体验下来,发现唯一的变化竟然只是,搭建场景的时候选择什么地图。
这是什么意思呢?
具体来说,aiSim中的动态场景仍通过OpenSCENARIO协议设计,而对于协议中调用的静态地图(OpenDRIVE格式),既可以选用传统工具(如RoadRunner)搭建的地图(动画感较强,真实度有限),也可以选用3DGS生成的地图(纹理细节更贴近真实场景)。
可见,3DGS本质上只是一种高效的建模手段。未来,它大概率会成为自动驾驶仿真软件的一个标准化组件——用户可选择3DGS生成的静态场景地图,再在此基础上定义动态场景,例如添加各类交通参与者,构建完整测试场景。
浅尝了一下aiSim的3DGS的仿真效果后,接下来畅想一下未来3DGS应用到自动还是仿真测试的流程。
如果3DGS能在解决感知仿真问题然取得突破,那么接下来的一些工程化应用将成为重点。
三、流程变革:3DGS对仿真测试工作流的优化(1)传统仿真测试流程以前的传统的仿真测试可能大概是这样的:
智驾产品定义中有新的功能需求发布啦;
仿真小伙伴收到需求,开始构思具体的测试用例该有哪些,以完整的覆盖产品需求;
测试用例制定完毕,交给上游产品们进行评审,确认无误后就开始画场景。一般都是基于某款仿真软件徒手制作静态地图,然后定义各种动态场景,形成场景库;
在仿真工具链中集成被测对象(智驾软件),然后开始进行仿真测试;
跑完一轮仿真测试,输出测试报告,然后推动软件开发进行迭代;
无需手动绘制地图,通过3DGS快速生成——采集实景数据(如十字路口、特定车辆)导入工具,即可自动生成高精度三维模型/地图,大幅缩短场景搭建周期,降低人工成本。
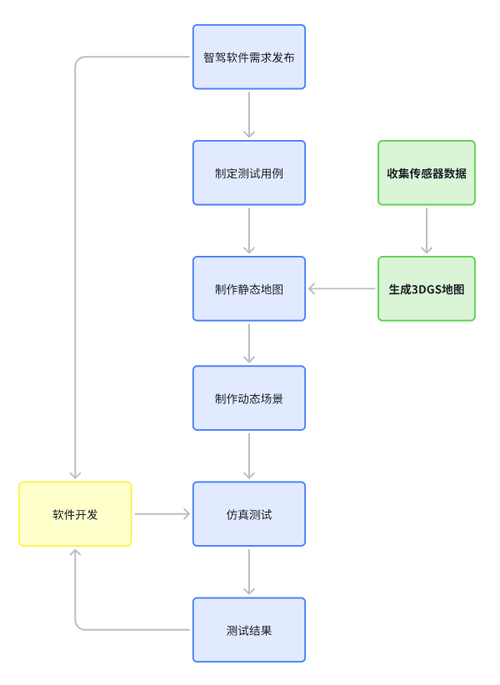
流程图:3DGS在仿真测试的工作流
作者寄语:在使用aiSim的过程中,我发现相应的地图非常大,动辄几十个G,这对于工程化部署非常不利,3DGS格式的3D地图或者3D模型,必须支持客户自定义编辑,以实现模型瘦身、局部细节调整、地图组装等功能,那么一款3DGS的可视化编辑器是非常有必要的。
四、展望:3DGS的潜力与局限3DGS的核心价值的是解决“场景还原度与建模效率”的矛盾,未来大概率会成为自动驾驶仿真软件的标准化组件。但它能否成为感知仿真的终极破局者,仍取决于两大关键:一是海量实景数据的训练积累,二是理论研究的深入(解决伪影、场景模糊等技术痛点)。
值得注意的是,3DGS的技术门槛较高,并非企业可轻易自研,这或将帮助头部仿真软件供应商构建核心竞争壁垒,进一步促进行业分化。在智驾端到端技术普及的当下,唯有攻克仿真置信度难题,3DGS才能在闭环测试、训练数据生成等核心场景中发挥更大价值。
3DGS并非自动驾驶仿真的“终极答案”,但无疑是破解感知仿真置信度困境的关键突破口。3DGS和世界模型并不是非此即彼的单选题,而是可以组合使用,互相取长补短,形成互补。这种互补格局的核心的是技术短板互抵、能力边界互补,围绕“高保真、高效率、全场景覆盖”的核心需求形成协同范式:3DGS以实景扫描为基础,提供高保真静态场景基底,解决世界模型“虚拟失真”与“仿真-实车gap”问题,为其提供真实数据锚点;世界模型则凭借逻辑推演与场景生成能力,快速拓展长尾、极端场景,弥补3DGS对稀缺场景采集成本高、覆盖不足的短板,同时借助3DGS的真实数据反哺自身优化。随着两者技术的持续迭代与商业化落地,这种“实景基底+虚拟拓展”的协同模式,将推动自动驾驶仿真从“辅助验证工具”向“核心闭环环节”转型,为端到端智驾技术的快速落地提供核心支撑。
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。
相关推荐
LED显示器件发展简史和应用趋势概述
英飞凌XENSIV第四代磁传感器支持最高达到ASIL B级要求的汽车功能安全应用
意法半导体推出首款集成人工智能加速功能的汽车微控制器
汽车传感器技术推动非车用嵌入式设计的发展
汽车智能交通系统( ITS) 中的关键技术—电子地图
新汽车音响供电电源DC-DC变换器电路
意大利驻伊宪兵遭汽车炸弹袭击 至少已44人死亡
汽车12V-HID灯逆变器部分
KENWOOD_KAC649S汽车音频功放图
毕业生就业:IT业遇空前寒流 汽车制造最火爆
由W723构成的汽车用的8A直流稳压电源
深度体验Microchip自动辅助驾驶应用方案——2025巡展开启报名!
新汽车音响供电电源DC-DC变换器电路
想做汽车GSM防盗器的公司或遇到困难的公司可以与我联系
48伏系统:传统与轻度混合动力车的最佳选择
无线充电基础知识及应用培训教程
全景抬头显示技术:新型粘合剂解决方案助力全宽挡风玻璃投影量产
汽车印制电路板(PCB)市场研究报告2025-2035
无线充电基础知识及应用培训教程(2/3)
无线充电基础知识及应用培训教程(3/3)
可调型汽车蓄电池充电器电路
意法半导体推出创新型Teseo VI系列全球导航卫星系统 (GNSS) 接收器芯片,推动汽车及工业应用领域,精准定位技术普及化
摩托罗拉168VA手机汽车充电器剖析
NVIDIA 推出 Alpamayo 系列开源 AI 模型与工具
瑞银示警:DRAM短缺逼近汽车业 2大品牌最危险
安全&底盘系统
汽车电池充电器电路图
英飞凌推出首款100V车规级晶体管,推动汽车领域氮化镓(GaN)技术创新
E点冷知识:车内空无一人,你敢坐吗?
用eFuse缓解汽车短路危险