硬件看门狗导致MCU启动时间慢

最近,在项目交付过程中,我们遇到了一个有趣的问题,与大家分享一下。
客户的需求是:在KL15电压上电后,MCU需要在200ms内发送出第一包CAN报文数据。然而,实际测试结果显示,软件需要360ms才能发送出第一包数据。
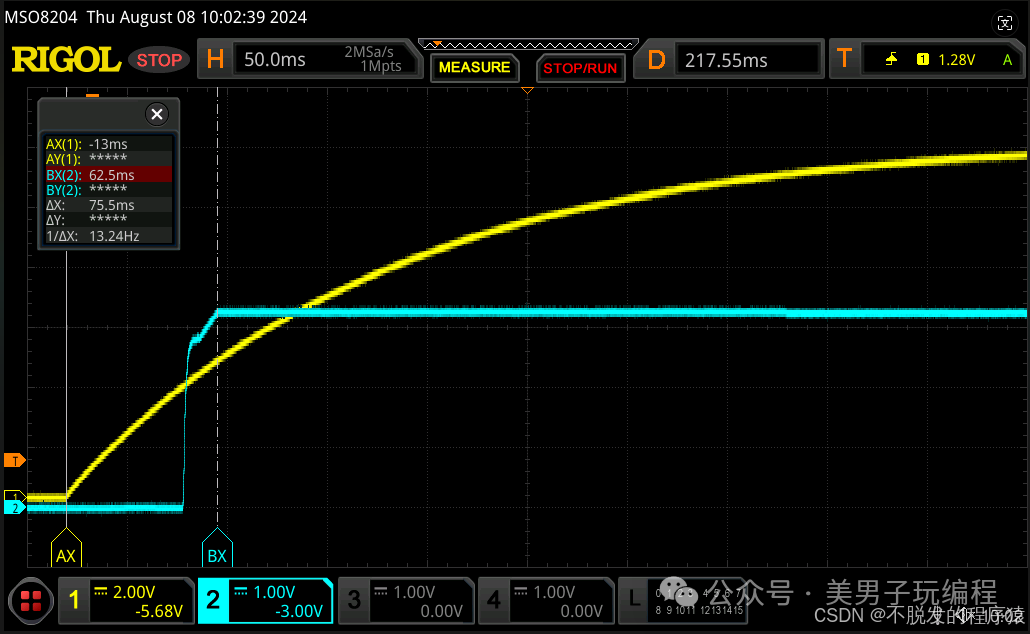
经过测量,从KL15上电到MCU 3.3V电压稳定,耗时75.5ms。
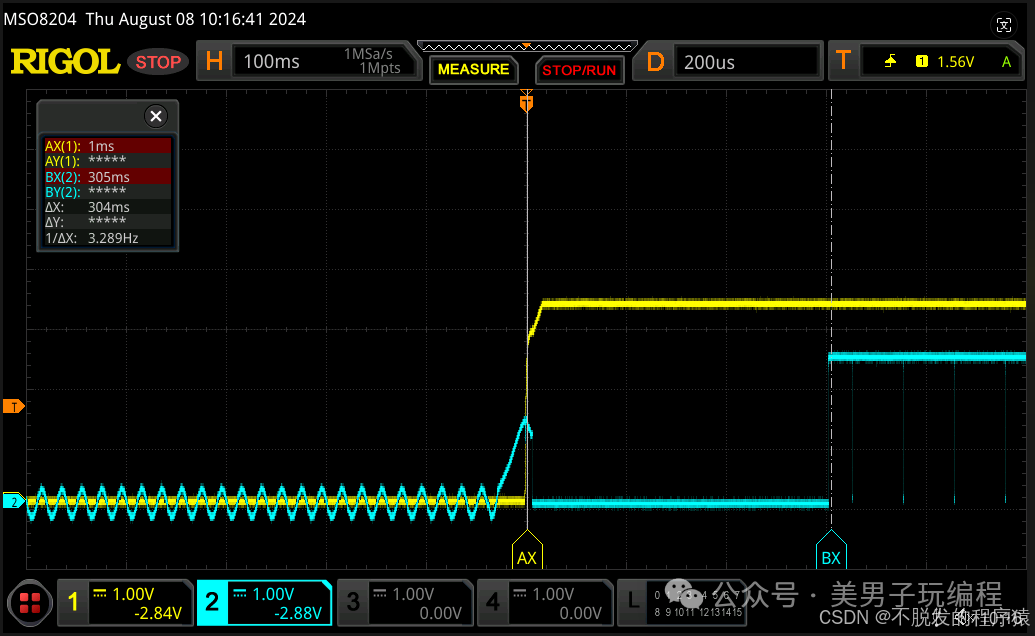
而MCU在3.3V电压输出第一包CAN报文耗时304ms。
此外,MCU软件从BOOT启动到APP启动耗时60ms。
理论上,这些时间加起来不应超过140ms,那么多余的220ms究竟来自哪里呢?
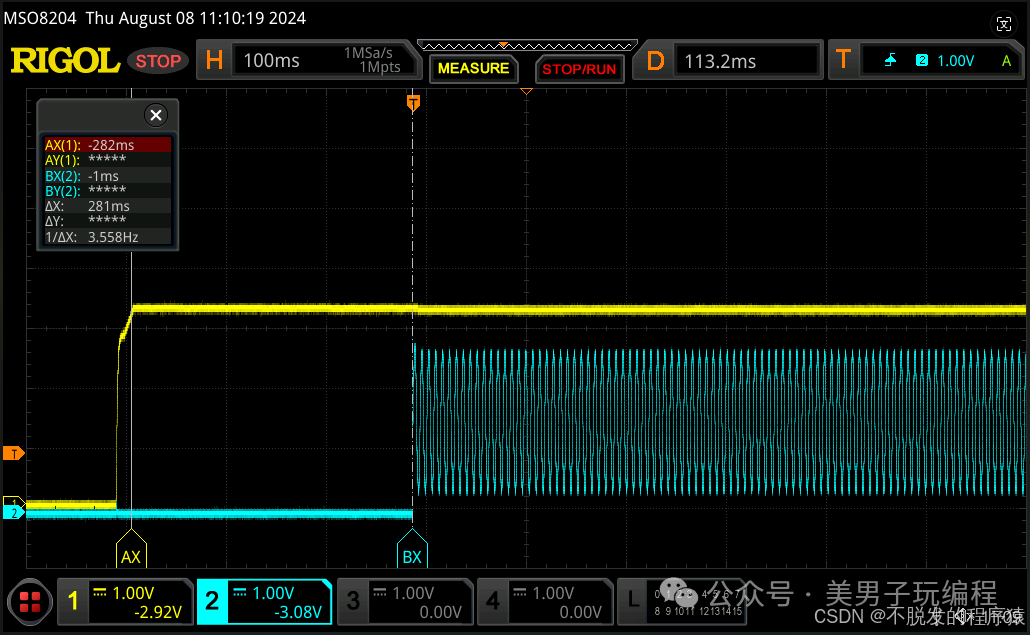
进一步调查发现,外部晶振在3.3V电压稳定后的281ms才开始正常工作。
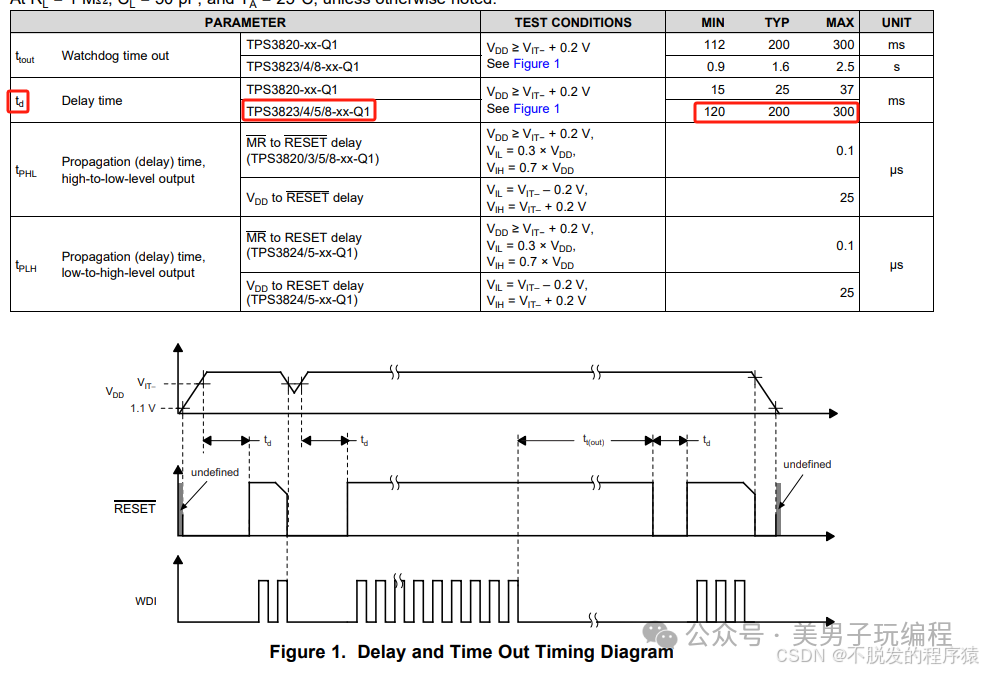
最终测试发现,表面上看似晶振起振慢,实际上是由于看门狗在启动阶段一直拉低MCU的RESET脚,从而影响了晶振的起振速度。
根据使用的硬件看门狗芯片的特性,首次上电后的100~300ms内,实测结果显示会在200+ms的时间里处于拉低状态。
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。
关键词:
看门狗
MCU
相关推荐
飞思卡尔杯-第六届设计应用大奖赛 一等奖获奖论文
芯驰科技E3650:为理想星环OS保驾护航
请推荐一款带看门狗和手动的3.3V复位芯片
一款实用的看门狗电路
4510外加看门狗电路问题
TI将边缘AI微控制器更深入地融入嵌入式设计
飞思卡尔杯-第六届设计应用大奖赛 二等奖获奖论文
电子科技大学--嵌入式系统应用开发技术38
恩智浦MCX微控制器全景式解读
51的看门狗电路
一个看门狗电路
有源晶振、无源晶振与MCU的时钟关联
飞思卡尔杯-第六届设计应用大奖赛 三等奖获奖论文
售价仅1.7元!STC高性价比车规级MCU重塑汽车电子供应链格局
Badge USB OCD 与 78F0513D 使用演示视频
看门狗电路
MXT8051 SoC开发系统的设计方法
电子看门狗电路
单片机模糊控制系统设计与应用实例
边缘 AI 加速的 Arm® Cortex®‑M0+ MCU 如何为电子产品注入更强智能
解决mpc860软件看门狗
大家一起过来瞧瞧这个定时器,看门狗程序
MCU,智能觉醒
意法半导体Stellar P3E:车载边缘AI MCU 开启汽车多合一电控新时代
请问看门狗芯片是怎么用的啊?
在工业自动化和智能家用电器设计中实现支持边缘 AI 的电机控制
电子科技大学--嵌入式系统应用开发技术39
NEC MCU 78F0513D开发板使用教程
意法半导体全新STM32C5系列,重新定义入门级微控制器性能与价值,赋能万千智能设备
电子看门狗