- 文中对四旋翼无人机进行建模与控制。在建模时采用机理建模和实验测试相结合的方法,尤其是对电机和螺旋桨进行了详细的建模。首先对所建的模型应用PID进行了姿态角的控制。在此基础上又对各个方向上的速度进行了PlD控制。然后在四旋翼飞机重心进行偏移的情况下进行PID控制,仿真结果表明PID控制律能有效的控制四旋翼无人机在重心偏移情况下的姿态角和速度。最后为了方便控制加入了控制逻辑。
- 关键字:
四旋翼 建模 PID 控制 重心偏移 控制逻辑
- 各种智能型数字显示调节仪,一般都具有PID参数自整定功能。仪表在初次使用时,可通过自整定确定系统的最佳P、I、D调节参数,实现理想的调节控制。在自整定启动前,因为系统在不同设定值下整定的参数值不完全相同,应
- 关键字:
PID 数字显示 调节仪 参数
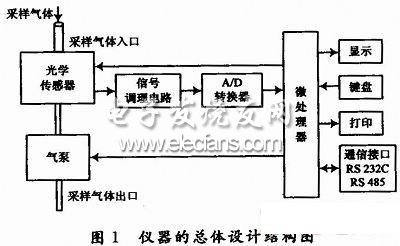
- 摘要:介绍了一款基于单片机的全自动锅炉压力控制器的设计。该系统能根据锅炉现场检测的各个状态做出实时精确的自动控制,如实现温度、压力、水位等的监控,数码管显示、报警、系统参数设置的功能。该系统还采用模糊
- 关键字:
压力 控制器 设计 锅炉 PID 单片机 模糊 基于
- 各种智能型数字显示调节仪,一般都具有PID参数自整定功能。仪表在初次使用时,可通过自整定确定系统的最佳P、I、D调节参数,实现理想的调节控制。在自整定启动前,因为系统在不同设定值下整定的参数值不完全相同
- 关键字:
PID 数字显示 调节仪 参数
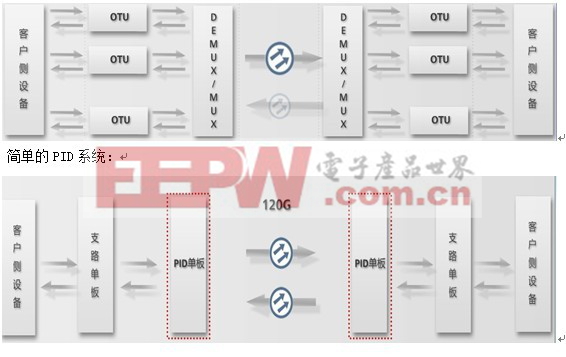
- 随着信息技术的高速发展,OTN网络在城域应用中越来越受关注,但传统的OTN网络采用光、点分离全系统构建城域网络,不仅占用机柜数量多,而且光层子架多,大量占用了机房有限的空间资源;尾纤连接复杂给维护带来困难;大
- 关键字:
应用 传送 城域 技术 PID
- 各种智能型数字显示调节仪,一般都具有PID参数自整定功能。仪表在初次使用时,可通过自整定确定系统的最佳P、I、D调节参数,实现理想的调节控制。在自整定启动前,因为系统在不同设定值下整定的参数值不完全相同,应
- 关键字:
PID 数字显示 调节仪 参数
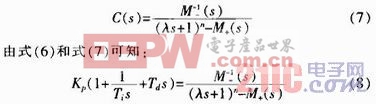
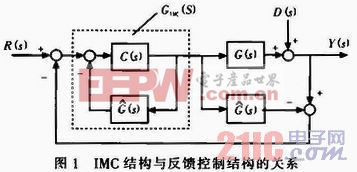
- 摘要:针对无刷直流电机中传统PID控制器参数调节复杂、对环境适应能力较弱等问题,在分析内模控制与经典PID控制的内部对应关系的基础上,综合其优点,设计采用了一种基于内部模型的PID控制器(简称IMC-PID)对无刷直流
- 关键字:
调速 系统 应用 电机 直流 PID 控制器 内模 BLDC

- 摘要:文中介绍了基于神经模糊PID混合控制的变频调速恒压自动供水系统的硬件组成,包括主电路设计、控制电路的分析设计、硬件配置及组成。本系统应用于实践后,节能效果十分明显。
关键词:恒压供水;电机;变频器;
- 关键字:
供水 系统 硬件 设计 控制 混合 神经 模糊 PID 基于
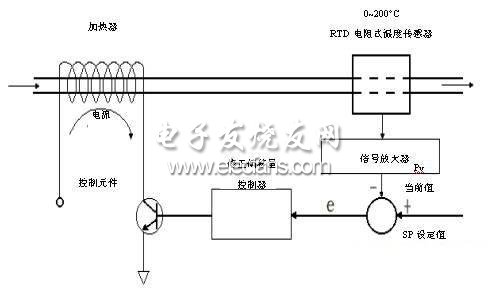
- 摘要:采用AT89C52单片机做为控制核心,利用三位按键结构和液晶显示屏进行给定温度值的设定和实际炉温的显示,由固态继电器构成执行单元,驱动加温装置的运行。同时,将模糊控制算法引入传统的电阻炉温度控制系统,构
- 关键字:
温度 控制系统 电阻 PID 模糊 基于
- 摘要:针对一类不稳定时滞过程,采用双环控制结构,首先使广义对象(内环)稳定,然后用Tavlor级数展开法,根据内模控制原理设计外环控制器,得到等效的PID控制器参数的整定方法。仿真结果表明,整定后的系统不但具有良
- 关键字:
控制器 参数 MIC-PID 展开 Taylor 基于
- 0 引言 轮式小车是智能小车机械结构的主体部分,由车身、轮子、速度传感器、转动轴等结构部件构成。还包括提供动力的驱动器,采集环境信息的摄像头等模块,综合实现收集小车的自身状态信息或外部环境信息,并对传
- 关键字:
小车 方案设计 智能 算法 PID 控制 采用
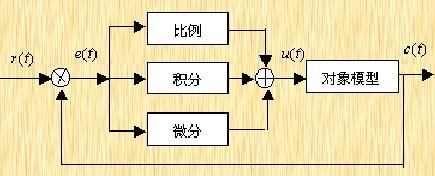
- PID就是比例微积分调节,具体你可以参照自动控制课程里有详细介绍!正作用与反作用在温控里就是当正作用时 ...
- 关键字:
比例微积分 PID 控制系统
- 摘 要:本文提出了一种开关电源模糊控制PID的的设计和MATLAB仿真方法。仿真结果表明:具有模糊控制的PID动态响应快、超调量小、负载变化引起输出电压的变化小。关键词:开关电源;PID控制;模糊控制Abstract:This pap
- 关键字:
MATLAB 仿真 研究 设计 PID 模糊 控制 开关电源
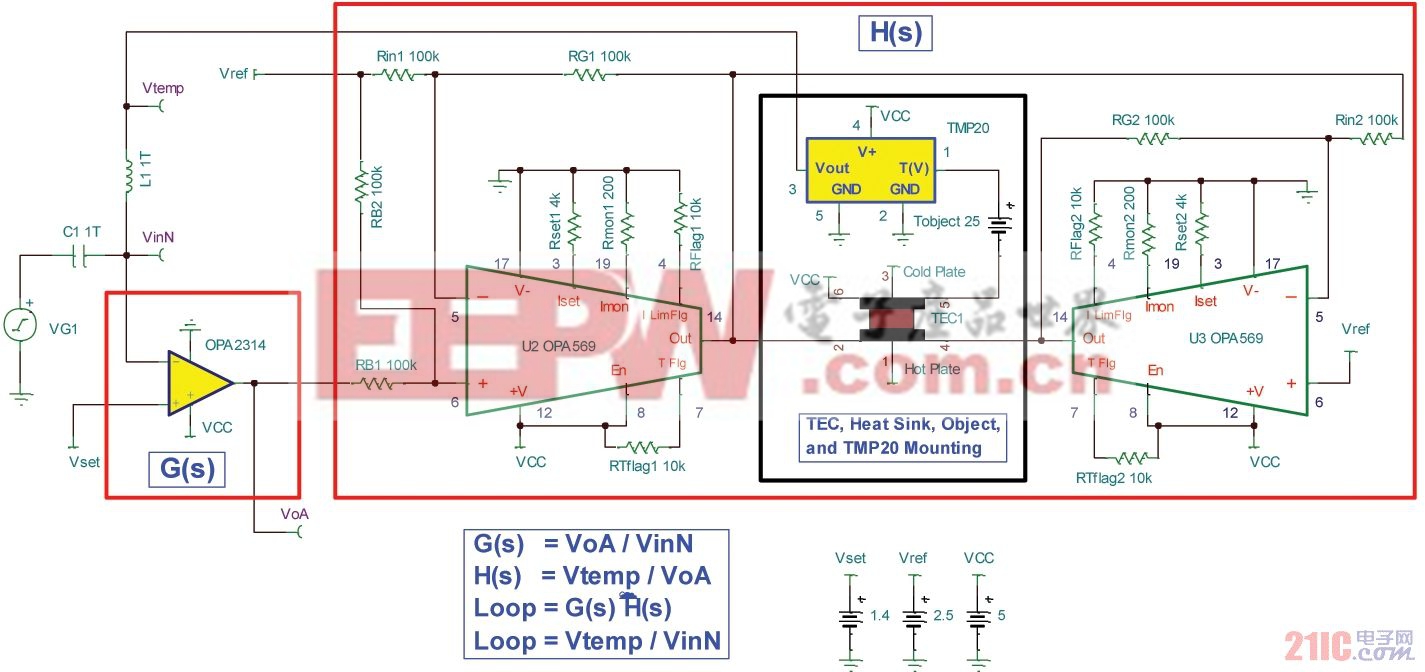
- 关键词:运算放大器、温度传感器、SPICE、PID、TEC、EDFA、TMP20、OPA569、OPA2314、德州仪器、TI 使用模拟比例积分微分 (PID) 控制器的温度控制是一种非常简单的电路,是确保热电冷却器 (TEC) 的设置点能够对温度或
- 关键字:
环路 PID 控制 温度 TEC SPICE 设计 利用
- 前言机器人惯量前馈技术是贝加莱公司的一项非常重要的技术,即使在整个业界也是一项前沿的技术,它能解决机器人...
- 关键字:
前馈控制 机器人 PID
pid介绍
PID(进程控制符)英文全称为Process Identifier,它也属于电工电子类技术术语。
PID就是各进程的身份标识,程序一运行系统就会自动分配给进程一个独一无二的PID。进程中止后PID被系统回收,可能会被继续分配给新运行的程序。
PID一列代表了各进程的进程ID,也就是说,PID就是各进程的身份标识。
==========
PID一列代表了各进程的进程ID,也就 [
查看详细 ]
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473