风力涡轮机控制系统在过去几十年中经历了显著演变,从简单的传统控制器发展到基于人工智能的复杂策略。早期公用事业规模的涡轮机依赖比例积分导数(PID)控制器作为控制回路的骨干,因为PID的简单性和可靠性。PID调节器在工业中仍被广泛用于叶片螺距调整和发电机扭矩控制等任务,确保涡轮机以所需的转速和功率输出运行。然而,随着涡轮机体积和结构的增加,PID控制在处理非线性气动行为和多变量目标方面的局限性变得明显。近年来,计算和机器学习的进步催生了强化学习(RL)技术的转变,有望解决现代风能系统中高维控制挑战。现实生活
关键字:
风力涡轮机
控制系统
PID
增强学习
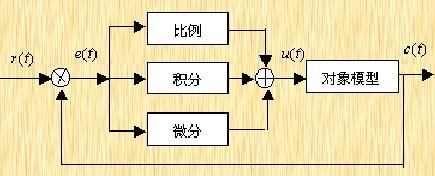
在过程控制中,按偏差的比例(P)、积分(I)和微分(D)进行控制的PID控制器是应用最为广泛的一种自动控制器。它具有原理简单,易于实现,适用面广,控制参数相互独立,参数的选定比较简单等优点;而且在理论上可以证明,对于过程控制的典型对象 ── “一阶滞后+纯滞后”与“二阶滞后+纯滞后”的控制对象,PID控制器是一种最优控制。PID调节规律是连续系统动态品质校正的一种有效方法,它的参数整定方式简便,结构改变灵活(PI、PD、…)。PID是闭环控制算法因此要实现PID算法,必须在硬件上具有闭环控制,就是得有反馈
关键字:
过程控制
PID
控制算法
伺服控制技术是确定电机位置的必要手段。本章将介绍伺服控制的原理。我们还将介绍可编程伺服/顺序控制器(PSC)在伺服控制中的应用。我们将解释电机伺服控制,首先让我们从伺服控制的基础“反馈控制”开始。反馈控制电机是一种把电能转换成旋转运动的装置。为了正确地旋转电机,必须执行反馈控制。反馈控制将监控电机的旋转方式,并根据结果确定提供给电机的电流量。换句话说,通过以下步骤可以保持适当的转速:1、检测电机转速。2、决定应该增加还是降低电机的转速。3、根据决定,增加或减少提供给电机的电流。旋转编码器为了执行反馈控制,
关键字:
电机
伺服控制
PID
01 先来彻底搞懂PID到底是啥?PID,就是“比例(proportional)、积分(integral)、微分(differential)”,是一种很常见的控制算法。在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。PID已经有107年的历史了,它并不是什么很神圣的东西,大家一定都见过PID的实际应用。比如四轴飞行器,再比如平衡小车......还有汽车的定速巡航、3D打印机上的温度控
关键字:
PID
算法
工业控制
调节器
水面垃圾会造成水体污染,它不仅破坏了水域生态系统平衡,并且对人类社会的生产和生活也产生了巨大危害,还会影响到船只的航行安全。目前,市面上主要的水面垃圾清理船体型庞大,很难应用在一些小型水域。并且多采用人工搜寻和清理的方式,但是人工搜寻效率低,人力成本高。针对该问题,设计了一款基于机器视觉的水面垃圾寻航系统,该装置基于YOLO-V2卷积神经网络模型进行目标检测,寻找水面垃圾等漂浮物,控制船只靠近目标物进行拾取,通过GPS进行导航,使用蚁群算法和完全遍历算法进行路径规划,同时用ESP32-cam和小熊派完成云
关键字:
202307
水面垃圾
卷积神经网络
优化算法
PID
路径规划
设计了以STM32F103C8T6芯片为主控的智能物流机器人,并对机器人系统性能进行分析。电机调速动态指标中调节时间平均为560 ms,超调量平均34.6%。随着电机转速增大,调节时间呈减小趋势。机械臂跟踪性能在PID控制下表现良好,平均每2.5 s完成跟踪目标并准确抓取,实物系统有良好的稳定性、可靠性和准确性。
关键字:
202304
STM32
OpenMV
PID
机械臂
物流机器人
摘要:随着人工智能与工业自动化的发展,机器人在各个领域的运用愈发广泛,自动化机器人逐渐代替人力
已经成为社会的发展趋势。电脑鼠作为移动机器人的典型代表,涉及到运动控制、传感器、路径规划、机械设
计等多个技术领域。本设计对当前市面上流行的电脑鼠机器人进行改进和优化,通过改进电脑鼠的整体结构,
提高运行的稳定性,通过设计电脑鼠的运动驱动方案、测距方案,并深入研究电脑鼠的运动算法,并采用DFS
算法重新设计电脑鼠的路径规划算法,实现电脑鼠的最优路径规划。并能够通过上位机实时显示电脑鼠的电池
电压、运行
关键字:
202206
DFS
电脑鼠
PID
红外传感器
人工智能
上位机
蓝牙
本文是以PID(比例、积分、微分)算法为核心,基于STM32控制芯片的直流电机控制系统研究,硬件模块包括L298N电机驱动模块、编码器测速、PWM(脉冲宽度调制,Pulse Width Modulation)输出等,软件部分以Keil MDK(混合开发工具,Mix Development Kit)为开发环境,实现调速系统各子模块功能,并对结果进行分析。此次研究搭建的系统实现使直流电机的稳态误差始终保持在0.49%以下,直流电机速度精度控制在95%以上。在额定转速时,其稳态误差为0.25%。随着设定电机转速
关键字:
直流电机调速
PWM
PID
STM32
202202
李亚琦,秦 斌,王 欣 (湖南工业大学 电气与信息工程学院,湖南 株洲 412008) 摘 要:研究了磁悬浮小球系统的控制问题,为了解决传统PID控制方法在磁悬浮小球控制过程中调节效果不理想,鲁棒性较差,易受外界扰动而失去稳定的问题,采用了一种基于鲁棒控制的方法来进行系统的控制,鲁棒控制算法能解决磁悬浮系统在外界干扰的情况下使系统保持预期的性能要求。将传统PID控制与现代H ∞ 鲁棒控制进行仿真比较,通过仿真结果表明利用鲁棒H ∞ 控制系统能够提高磁悬浮系统的响应速度,降低系统超调量,较少外界干扰对
关键字:
201910
鲁棒H ∞ 控制器设计
磁悬浮小球
PID
动态性能
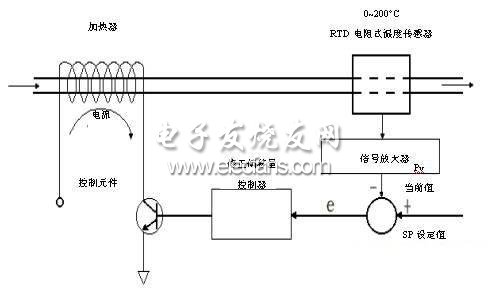
电路的功能若对温度进行控制并要求以最短的时间达到规定的温度时,可在普通比例控制电路上加上对误差进行积分的电路,但这样会随时间的增加而扩大,面
关键字:
PID
OP放大器
温度
电路
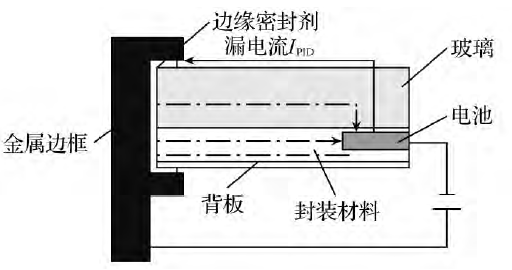
摘要 6月1日,国家能源局等部门印发《关于2018年光伏发电有关事项的通知》(因落款日期为5月31日,业内称为“5·31新政”),提出暂不安排2018年普通光伏电站建设规模,仅安排10GW左右的分布式光伏建设规模,进一步降低光伏发电的补贴强度。这突如其来的新政犹如一盆凉水,让一度沉浸在疯狂状态的光伏行业逐渐清醒。 压力催生动力,新政的发布意味着光伏企业需要转变发展方向,通过更多的技术升级降低光伏发电成本,同时这也是一个契机,企业也要更加沉下心来去解决之前光伏系统里遇到的问题,本文让我们
关键字:
光伏
PID
漏电流
伴随着DSP集成芯片技术的逐步发展,这一新兴技术也被广泛的应用在了DC-DC变换器的PID控制中,能够有效提升移相全桥型DC-DC变换器的动态响应速度。在今
关键字:
DC-DC变换器
全桥
PID
1.PID是闭环控制算法因此要实现PID算法,必须在硬件上具有闭环控制,就是得有反馈。比如控制一个电机的转速,就得有一个测量转速的传感器,并将结果反
关键字:
PID
闭环控制
反馈
误差调节
经验法PID参数工程整定口诀浅析-这是一首用经验法进行PID参数工程整定的口诀,该口诀流传至今已有几十年了,其最早出现在1973年11月出版的《化工自动化》一书中。现在网上流传的口诀,看来大多是以该口诀作为蓝本进行了补充和改编而来的。
关键字:
PID
参数整定
自动化
是德科技携多款创新性解决方案亮相汽车测试及质量监控博览会(AutomotiveTesting Expo,简称ATE),受到业界广泛关注。是德科技汽车和能源解决方案事业部总经理Siegfried (Sigi) Gross出席ATE,并接受媒体专访;是德科技汽车与能源解决方案事业部项目经理JungikSuh发表了主题演讲,介绍是德科技针对汽车与能源行业的多种创新性解决方案。来自是德科技的多位技术专家与中国汽车与能源行业从业者深度交流,针对汽车电子串行总线测试、毫米波雷达、车身
关键字:
是德科技
TS-8989
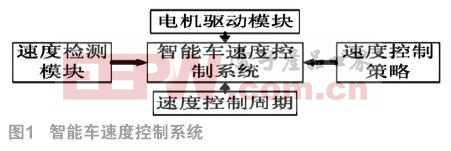
本文重点介绍了基于光电自动寻线智能车的速度控制系统的设计,包含直流电机的驱动模块、速度检测模块、速度控制策略、速度控制周期等部分。采用两片MC33886芯片来驱动电机运行,用反射式红外对管检测电机速度,实现对电机的闭环控制,通过大量的试验,最终速度控制策略采用了增量式PID控制和BangBang控制相结合的方法,并创新性地使用两个中断相结合的方法使得速度控制周期为等时的,从而对智能车过弯速度达到良好的控制。
关键字:
速度控制
增量式 PID 控制
BangBang 控制
控制周期
201709
联发科技被测设备使用罗德与施瓦茨测试系统成功地完成了A-Beidou的相关验证, 这是全球导航卫星系统(GNSS)定位和导航演化史上的一个重要里程碑,这是第一次可以在测试仪表上面对支持A-Beidou的设备进行验证和检验。 罗德与施瓦茨的R&S TS-LBS是一个可以测试GNSS和基于网络LBS的测试系统。该系统是由一台用来模拟基站的R&S CMW500 和一台模拟GNSS信号的R&S SMBV100A组成。R&S&n
关键字:
R&S
TS-LBS
LBS
位置服务
开发过USB设备驱动的朋友,不知有没有碰到过下面的问题:如果你的设备驱动程序没有经过数字签名,那么,在XP系统下,你在每个USB口上第一次插上你的USB设备时,系统都会要求你装一次驱动程序。这种感觉是很不好的。我们希望能像大多数USB移动盘一样,插上设备就自动安装驱动,然后就可以对设备进行访问了。
关键字:
PID
VID
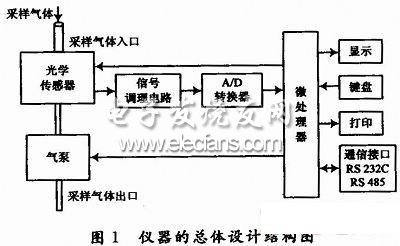
本设计智能传感器节点完成如下任务:1、具有多种传感器输入接口(如检测环境温度、湿度、光照等参数);2、同时实现多路传感器的信号采集;3、节点具有网络接口,可以以网页的形式远程登录节点,对节点进行观测;4、可以实现节点参数的设定,如传感器校准、标度变换、冗余传感器切换等;5、可以实现某些控制功能,输出信号为电压、电流、、PWM
关键字:
智能传感器节点
信号采集
PID
AT32UC3A
AVR32
全球半导体联盟(GSA)预计在2025年以前全世界会有超过750亿部设备连上网络。网络运营商正在忙于准备应对实际上数量无限的物联网无线模块的网络,聚焦于Cat 1,Cat M1和Cat NB1的设备。 过多的物联网设备会让网络过载,影响它们的性能。这些设备必须经过测试以确保网络功能正常。为此,美国最大的无线网络运营商发布了针对支持物联网设备的制造商的主机设备认证测试方案。认证测试方案超出了3GPP(无线通信的标准化机构)所制定的基本要求,定义了网络中用户设备的额外要求。
关键字:
R&S
TS-290
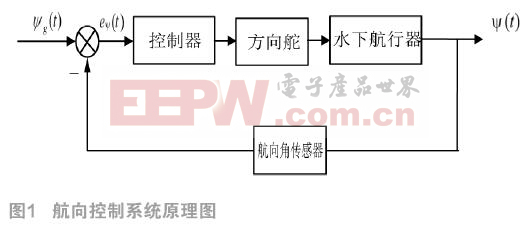
水下航行器操控性能指标中对定向性能有较高要求,而水下航行器的运动具有强的非线性和耦合性,使得不同航速下定向控制和定深转向综合控制成为难点。本文建立了水下航行器的运动学模型,基于滑模理论设计了航向控制器,在MATLAB SIMULINK环境下搭建了航向控制仿真系统,数值仿真结果表明,滑模变结构控制器对于不同航行条件具有较强的适应性,同时,航向的控制效果明显优于PID控制器。
关键字:
水下航行器
滑模变结构控制
PID
定向控制
20170203
小明接到这样一个任务:有一个水缸点漏水(而且漏水的速度还不一定固定不变),要求水面高度维持在某个位置,一旦发现水面高度低于要求位置
关键字:
PID
自适应神经模糊推理系统(ANFIS)依据模糊逻辑和神经元的知识,而常规的模糊控制系统是一个不能自动地将专家经验知识转化为推理规则库,同时缺乏有效的方法改进隶属度函数。该系统使用最小二乘法和反向传播的混合算法来调整条件参数和结论参数,并且能够根据系统本身自动产生模糊规则。根据以上内容本文采用了ANFIS,并将其应用到LED温湿度环境的控制中。结果表明:相比于常规的PID控制,该方法能够较好的提高温湿度控制系统的动态稳定性和抗干扰性。
关键字:
ANFIS
减法聚类
温湿度控制系统
PID
摘要:气味源的循迹是目前的研究热点之一,在以后的日常生活以及生产方面有着较为广泛的运用。本文介绍了一种基于 STC12C5A60S2单片机设计的简便智能气味循迹小车。采用两个气味传感器,根据浓度差判断气味流向,并
关键字:
单片机
PID
气味
循迹小车
针对中央空调系统存在非线性、不确定性和干扰性等问题,提出了利用MATLAB实现模糊自适应PID控制,并对系统进行了编程仿真实验。仿真结果表明,将该方法应用在中央空调系统中是可行的,但是MATLAB不能与现场设备进行
关键字:
空调
模糊
自适应
PID
PLC
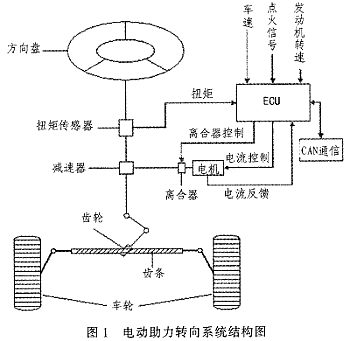
转向系统是汽车的重要组成部分,其性能直接影响着汽车行驶的稳定性和安全性。早期的汽车转向系统为纯机械转向系统,没有助力,转向动力完全由驾驶员提供,驾驶体验差。从上世纪30年代以后,逐渐出现了助力转向系统。目前,汽车助力转向主要有3种形式:液压助力转向系统(Hydraulic Power Steering,HPS),电控式液压助力转向系统(Electric Hydraulic Power Steeing,EHPS)以及电动助力转向系统(Electric Power Steering System,EPS)
关键字:
EPS
PID
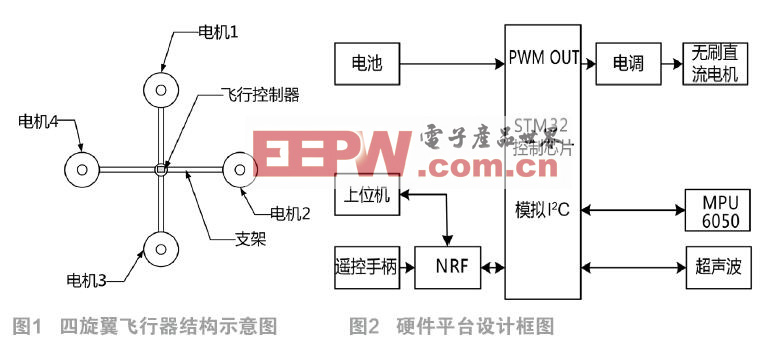
本文基于四旋翼飞行器的工作原理和性能特点,给出了飞行器控制系统设计方案,进行了姿态和高度数据采集的软件设计,并基于卡尔曼滤波算法完成了传感器数据融合,设计了PID控制器并完成了软件实现。实验结果表明,该控制系统能够稳定可靠运行,具有较强的鲁棒性。
关键字:
四旋翼飞行器
卡尔曼滤波
PID
鲁棒性
201610
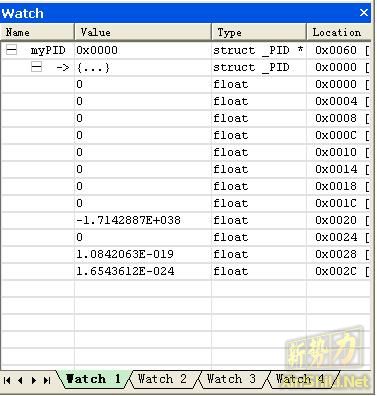
最近由于有些时间,于是想起了做一个PID设计,在网上收集了不少关于PID控制的理论,于是计划用mega16L做一个PID测试程序,发现一些意想不到的误差,不知各位同仁是否有遇到与我的类似的现象:我定义了一个PID结构体,在初始化的时候无法把每个元素的初始化值设置为0(见下面的仿真图),而且,PID结构体中的部分参数是应该不变的,在整个PID运算中,但是不应该变化的参数却在PID运算发生了变化,不知道是什么原因,到现在也无法查出原因。有兴趣的朋友可以一起参与讨论或有经验的朋友 给与相关帮助,谢谢!
关键字:
AVR
PID
ts-pid介绍
您好,目前还没有人创建词条ts-pid!
欢迎您创建该词条,阐述对ts-pid的理解,并与今后在此搜索ts-pid的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473