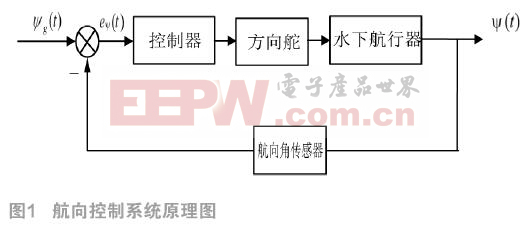
- 水下航行器操控性能指标中对定向性能有较高要求,而水下航行器的运动具有强的非线性和耦合性,使得不同航速下定向控制和定深转向综合控制成为难点。本文建立了水下航行器的运动学模型,基于滑模理论设计了航向控制器,在MATLAB SIMULINK环境下搭建了航向控制仿真系统,数值仿真结果表明,滑模变结构控制器对于不同航行条件具有较强的适应性,同时,航向的控制效果明显优于PID控制器。
- 关键字:
水下航行器 滑模变结构控制 PID 定向控制 20170203

- 导言
由于具有更高的效率、更好的动态响应以及更小的扭矩波动,磁场定向控制(FOC)正越来越多地被应用于消费和工业电机中。采用英飞凌8位微控制器XC886和XC888实现无传感器FOC技术(当输出15kHz PWM载频和133ms电流控制响应时间时)只需要占用58%的CPU负荷,就足以满足特定功能应用的需求。经过高度优化的PWM单元CAPCOM6E能触发模数转换器来测量单直流母线电阻上的电流,为能在标准的8位微控制器上实现无传感器FOC创造了条件。16位无传感器FOC算法仅由片上内嵌的协处理器MD
- 关键字:
微控制器 无传感器 定向控制
- 摘要: 在一个基于ARM7的单片机上实施合理的控制算法(如磁场定向控制),三相无刷电机的动态响应性能将会变得像分开励磁的直流电机一样快速。这种控制方法使三相无刷电机可用于汽车、机器人、工业变频器以及某些家电设备中的高端电机驱动器。本文主要介绍如何在一个ARM处理器产品上实现这些系统控制方案,该单片机含有先进的PWM生成和信号调节功能所需的外设,避免了专用或混合处理器架构所需的学习过程。
电机驱动能效不论提高多少,都会节省大量的电能,这就是市场对先进的电机控制算法的兴趣日浓的部分原因。三相无刷电
- 关键字:
ARM7 磁场 定向控制 工业控制 无刷电机 工业控制
定向控制介绍
您好,目前还没有人创建词条定向控制!
欢迎您创建该词条,阐述对定向控制的理解,并与今后在此搜索定向控制的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473