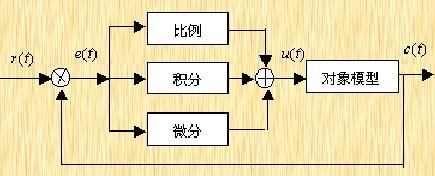
- 电磁设计
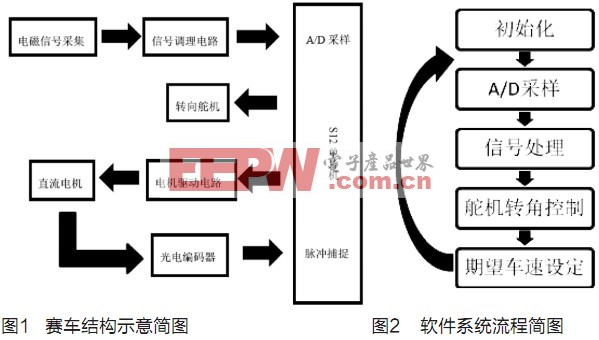
电磁导引智能车,主要包括电磁导引信号获取、起止线检测、控制算法三方面,此外,为使智能车拥有更好的性能还对车模进行了一些调整。
电磁导引信号获取
本设计中电磁信号获取包括了两部分:
1. 探头部分,本设计中使用工字型电感作为探头,利用它开放的磁芯作为感知交变磁场的媒介,为加强其抗噪性能,选取合适的电感与其串联组成谐振频率与信号频率一致的LC振荡回路。
2. 信号放大部分,本设计中使用两级级联的运放电路作为信号放大部分,两级放大电路均为带通放大,参数一致,都具有10
- 关键字:
Freescale 智能车 电磁导引 PID
- 摘要:由Buck电路的状态空间平均法,可得到其电压控制下的动态小信号模型,并应用PID实现其精确控制。为提高控制精度和抗干扰能力,用模糊控制器对PID参数进行实时整定,给出了仿真与实验结果及结论。关键词:Buck变
- 关键字:
Buck PID 变换器 数字

- 摘要:为实现铝箔板厚度的精确控制,采用了西门子S7-400PLC为核心的AGC系统,同时把模糊PID控制原理应用于某铝厂的铝箔板厚度控制系统,获得了理想的效果。详细阐述了AGC的工作原理、系统硬件和软件设计。实践表明,
- 关键字:
PLC PID

- 0 引言 轮式小车是智能小车机械结构的主体部分,由车身、轮子、速度传感器、转动轴等结构部件构成。还包括提供动力的驱动器,采集环境信息的摄像头等模块,综合实现收集小车的自身状态信息或外部环境信息,并
- 关键字:
小车 设计 方案 智能 算法 PID 控制 基于
- 真正要用PID算法的时候,发现书上的代码在我们51上来实现还不是那么容易的事情。简单的说来,就是不能直接调用。仔细分析你可以发现,教材上的、网上现行的PID实现的C语言代码几乎都是用浮点型的数据来做的,可以想象
- 关键字:
算法 PID 实现 如何 C51

- 摘要 步进电机是数字离散电机,特别适用于数字离散控制。但是其数学模型具有高度非线性的特点,PID控制难以实现较高精度性能,本文把模糊控制和PID控制结合起来,根据设置好的误差范围,实现自动切换。
关
- 关键字:
控制 设计 方案 PID 模糊 电机 位移 步进
- 最近经建会援引联合国最新数据,并加入台湾数据分析后发现,台湾是全球「老得最快」的国家,预计2025年后进入老年人口占总人口比率超过百分之二十的「超高龄社会」,预计在2050年与日本并列为全球最老的两个国家,65岁以上老年人口占总人口比率,都将高达百分之三十八
- 关键字:
3C MIC 资策会
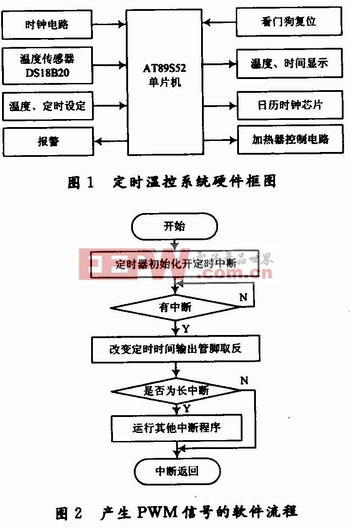
- 在实现定时温控系统的基础上,为实现对温度的精确控制,提出根据温度传感器DSl8B20的感温原理,利用AT89S52的定时器实现脉宽调制(PWM)功能,采用数字PID控制,讨论了一种恒温控制的数字PID控制算法,并通过C51程序实现了单片机的控制系统。使用结果表明,该系统具有控制效果好,精度高,超调量小等优点,且各项性能指标均符合要求。
- 关键字:
系统 应用 温控 算法 PID 控制 数字
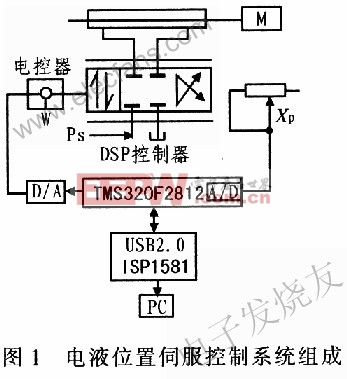
- 电液位置伺服控制系统的典型特征是非线性、不确定性、时变性、外界干扰和交叉耦合干扰等,系统精确的数学模型不易建立。因此,对电液系统的控制一直是一个复杂控制系统问题。 常规PID控制器具有结构简单、参数
- 关键字:
DSP 实现 控制系统 位置 控制器 NNC-PID
- 为抑制无刷直流电动机的高度非线性和大量随机扰动,根据模糊优化的PID控制方法设计多变量的无刷直流电机(BLDCM)的控制方案。该控制方案采用模糊算法在线自动整定传统的PID参数,可用来设计多自由度机器人手臂关节控制器。详细阐述系统的组成和运行模式。实验结果表明,该控制方案使系统的响应时间和以前相比缩短50%,超调量降低5%,转矩扰动减小30%,更能有效地提高系统控制的精确度、柔韧性和鲁棒性。
- 关键字:
电机 控制 直流 PID 模糊 优化 基于
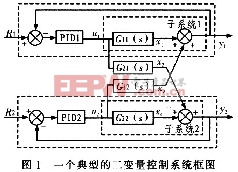
- 现代工业过程中面临越来越多的结构复杂的多变量系统,传统的单变量PID控制方法已无法满足要求,为了解决多变量系统的控制问题,以两输入两输出系统为例,提出一种基于阶跃响应的多变量频域模型辨识方法,并将此种方法与对角矩阵解耦控制方法相结合应用于多变量PID控制系统中。最后对滞后环节近似部分和对角矩阵解耦方法进行仿真验证。结果表明该方法能够更好的控制系统变量,误差减小50%以上。
- 关键字:
解耦 控制 研究 PID 及其 系统 辨识 变量

- 研究普通PID数字控制器在PLC控制系统中的应用,结果表明该算法容易产生误差积累,从而使得超调量过大,在此基础上提出增量式PID控制算法。阐述基于三菱FX2N增量式PID控制器设计方法,给出了增量式PID控制算法程序流程图和部分程序。实验结果表明,该控制算法既有利于改善系统的动态特性又有利于消除静差,比普通的PID控制具有更好的控制品质。
- 关键字:
控制器 设计 PID 增量 三菱 FX2N 基于
- 各种智能型数字显示调节仪,一般都具有PID参数自整定功能。仪表在初次使用时,可通过自整定确定系统的最佳P、I、D调节参数,实现理想的调节控制。在自整定启动前,因为系统在不同设定值下整定的参数值不完全相同,应
- 关键字:
PID 数字显示 调节仪 参数
mic-pid介绍
您好,目前还没有人创建词条mic-pid!
欢迎您创建该词条,阐述对mic-pid的理解,并与今后在此搜索mic-pid的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473