
- 引言
深海作业机器人是一种在水深5000~6000米的海底沉积物上行走、采集锰结核的智能履带车辆,两条履带由安装在后轮上的两台液压马达分别驱动,用变量泵调节速度。我国采矿区位于太平洋中部,为典型的深海平原,
- 关键字:
控制 防滑 行走 机器人 海底
- 电子产品世界,为电子工程师提供全面的电子产品信息和行业解决方案,是电子工程师的技术中心和交流中心,是电子产品的市场中心,EEPW 20年的品牌历史,是电子工程师的网络家园
- 关键字:
机器人 DSP 运动控制器
- 中国哈尔滨工业大学的科学家近日报告说,他们开发出一种可以在水面上行走的微型机器人,在军事侦察、水污染监测等领域具有广阔应用前景。有关研究成果已经刊登在美国《应用材料与界面》杂志上。
领导这项研究的潘钦敏教授告诉新华社记者,他们的研发大致可分为两个阶段。首先是从水黾腿部的“羽毛状”微纳米结构获得灵感,研发了一种“超级浮力材料”,这种新材料的水上载重能力惊人。
在自然界中,水黾等小昆虫可以在水面自由行走而不沉没,其原因是水黾的腿部具有特殊的微纳米
- 关键字:
微纳米 机器人
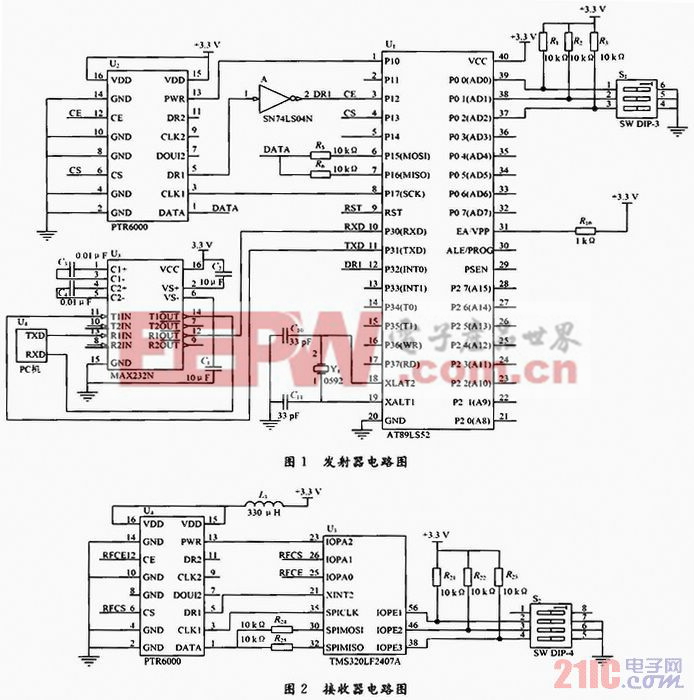
- 摘要:无线通信系统是足球机器人闭环控制系统的一个重要组成部分,上位机与机器人小车的通信通过无线通信模块来实现。提出一种基于PTR6000的足球机器人无线通信系统方案,包括发射器和接收器的硬件和软件的设计及实现
- 关键字:
系统 设计 无线通信 机器人 PTR6000 足球 基于
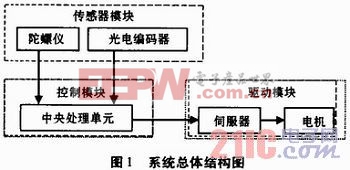
- 摘要:为实现移动式机器人的智能工作,研究了航迹推算定位技术,采用陀螺仪、光电编码器等传感器对已知航线的机器人进行行走定位。系统由驱动模块、传感器和反馈模块以及控制模块等组成,其模块化设计充分整合了系统
- 关键字:
定位 系统 设计 机器人 移动式 航迹 推算 基于
- 这是一个简单到令人发指的仿生避障机器人,仅由电池、开关、马达组成最基础的电学电路,就能表现出类似自然界生物的智能!在遇到障碍物时会掉头,看起来有 点象一只疯狂的小强。只要有基本的物理电学基础就可以自
- 关键字:
机器人 制作 仿生 电路 电学 基础

- 外国牛人教你一步步快速打造首台机器人,这里面说到的东西都非常简单,看过这些教程以后,你可以在几个小时内制造出一个机器人。何乐而不为呢? 由于有很多细小的东西需要你们去了解,以下就给你介绍这些东西,而没有其他。如果你对所要求的掌握的东西有
- 关键字:
打造 机器人 快速 步步 人教 外国
- 在一个加速全球化的世界里,制造业走向数字化的趋势下,一些重大变化其实已经发生。智能软件、新材料...
- 关键字:
智能软件 工业革命 机器人
- 著名工程师和艺术家Ken Goldberg在最近一次Humans Invent的采访中谈论了云教育机器人的未来,以及他目前的工作--手术机器人的发展状况。Goldberg认为,机器人和人类一样具有学习能力。它能够学会绘制云存储中的信息,能够更快地建立和分享信息。目前,他正在研发一个外科手术机器人,名为乌鸦(Raven)。
Goldberg称该机器人已经通过了编程训练,并表示对初步的结果非常满意。而目前正在与美国加州大学,旧金山和约翰斯·霍普金斯大学的工程师合作,着力于如何针对放射性
- 关键字:
云存储 机器人
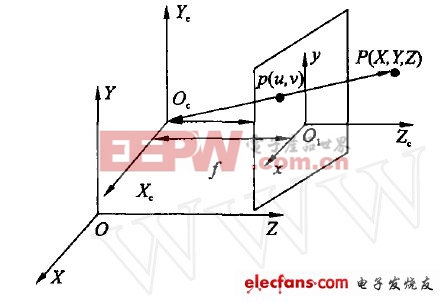
- 摘要: 针对移动机器人的局部视觉定位问题进行了研究。首先通过移动机器人视觉定位与目标跟踪系统求出目标质心特征点的位置时间序列, 然后在分析二次成像法获取目标深度信息的缺陷的基础上, 提出了一种获取目标的空
- 关键字:
设计 方案 定位 视觉 机器人 移动
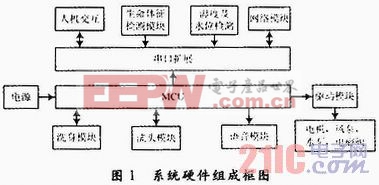
- 摘要:介绍了个人卫生护理机器人控制部分的设计与实现,该系统采用单片机作为微控制器,利用串口扩展芯片,实现了对洗头、洗澡、生命体征检测、上位机通信以及语音提示等功能模块的控制,完成了全自动洗澡的功能。实
- 关键字:
部分 设计 实现 控制 机器人 卫生 护理 个人
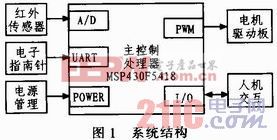
- 摘要:采用嵌入式微处理器、传感器和直流电机控制技术,设计基于16位高性能微处理器MSP430的除尘竞赛机器人。MSP4130F5418微处理器通过红外传感器和电子指南针分别获得障碍物和角度信息,进行处理后控制机器人的避障
- 关键字:
策略 研究 控制 及其 竞赛 机器人 除尘
- EDUROBOT-680-II型教学机器人是上海交通大学机器人研究所采用世界银行贷款研制的一种五自由度多关节的机器 ...
- 关键字:
USB总线 机器人 上下位机通信
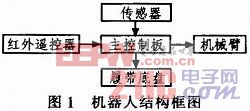
- 摘要:针对机器视觉采摘机器存在的技术不成熟,成本过高等不足,提出采用人工操控的半自动采摘技术,并进行了探索研究。设计了一款模拟采摘机器人,机器人以履带底盘为基座,三自由度机械臂,红外遥控操作。硬件电路
- 关键字:
机器人 设计 采摘 遥控 ATmega32 基于
机器人介绍
您好,目前还没有人创建词条机器人!
欢迎您创建该词条,阐述对机器人的理解,并与今后在此搜索机器人的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473



