- 自十几年前问世以来,辅助给医学行业带来了巨大的变化。机器人控制台提供了一个强大的平台,使泌尿、胸科、妇科和普通外科手术实现了微创。今天,机器人手术面临变革。最近的外科超声波系统,尤其是Analogic公司的BK医学超声系统高级机器人技术(ART)把精度和诊断置信度提高到全新的水平。术中机器人辅助超声波使医生得以实施更复杂的手术,改善病人的预后,尤其是接受前列腺癌根治术和肾部分切除术病人的预后。
美国奥兰多佛罗里达医院全球机器人研究所医疗主任、医学博士Vipul Patel和他的小组已经完成了五千
- 关键字:
Analogic 机器人 医学超声系统
- 1 引 言2001年,美国发明家Kamen发明了一种新型的方便快捷的两轮交通工具“Segway”,行走平衡控制技术成为全球 ...
- 关键字:
DSP芯片 双轮电动车 机器人
- 前言机器人惯量前馈技术是贝加莱公司的一项非常重要的技术,即使在整个业界也是一项前沿的技术,它能解决机器人...
- 关键字:
前馈控制 机器人 PID
- 实现汽车智能化的技术非常多, 本文利用目前比较热门的技术语音控制技术, 实现小车自动前进、后退、左拐、右拐等, 当然所设计的小车只是智能汽车的微模型, 还处于模拟演示阶段, 要真正实现智能汽车为人服务还有很
- 关键字:
方案 设计 机器人 小车 智能
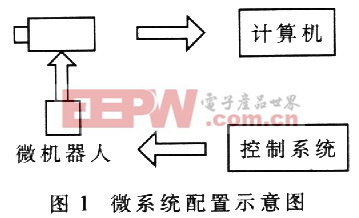
- 语音识别在微机器人控制系统中的应用,摘要:介绍了一种应用于微机器人控制平台的语音识别算法,可实现简单命令词语的识别,控制微机器人的移动。利用K均值分段法,在每次计算完观察值最佳状态序列后,插入一个重估过程,随时调整参数以识别下一个句子。实
- 关键字:
应用 控制系统 机器人 识别 语音
- 摘要:针对模块化机器人控制,提出一种基于FPGA的片上多核主控制器设计方案。利用SOPC技术在单一芯片上设计两个完全不同结构的核心:NiosII软核处理器和协处理器。详细介绍了机器人控制的路径规划流程、NiosII软核体
- 关键字:
设计 控制器 嵌入式 机器人 模块化

- 基于直线段匹配的移动机器人的障碍物检测,目前,基于机器视觉的障碍物检测方法大体上分为三类[1]。第一类方法是从单幅图像中提取已知的障碍物[2]。这种方法的缺点是需要已知障碍物的2D图像模式,或者需要一个学习阶段。第二类方法是利用运动信息提取障碍物,
- 关键字:
障碍 检测 机器人 移动 直线 匹配 基于
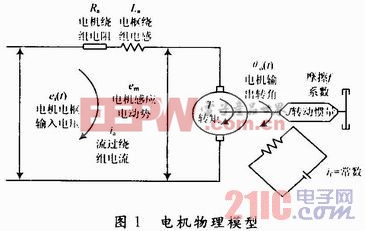
- 摘要:为了得到拟人机器人上肢关节控制电机的精确参数,通过建立直流电机的物理和数学模型,利用Matlab软件建模和仿真,找到了一个合适的PID控制方法,通过调节KP,KI,KD参数,系统获得了较高的控制精度和响应速度,
- 关键字:
参数 控制 关节 机器人 拟人
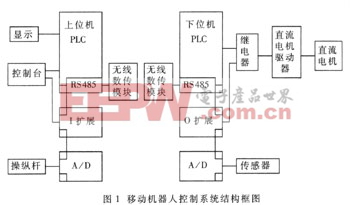
- 基于PLC的防爆机器人系统的控制,移动机器人由于具有优越的机动性和灵活性而备受青睐,在许多场合投入实际应用,如核工业检测,消防、火场检测,有毒、易燃、易爆气体场所探测,采矿、星球探测及无人战场等。为了适应不同环境下的应用,移动机器人控
- 关键字:
系统 控制 机器人 防爆 PLC 基于
- 基于远程机器人系统的自动控制平台的研究与设计,摘要:论述了面向远程机器人的自动控制平台的研究设计。对原有的控制系统进行了简单介绍,从设计思想、一个专用的数据结构以及运行流程方面对新的自控平台进行了描述。关键词:远程机器人自动控制运行脚本1自动控制平
- 关键字:
平台 研究 设计 自动控制 系统 远程 机器人 基于
- 摘 要: 依据现代机器人技术的发展特点,提出了一种基于ARM(Advanced RISC Microprocessor)、DSP和 arm-linu ...
- 关键字:
嵌入式系统 控制系统 ARM 机器人
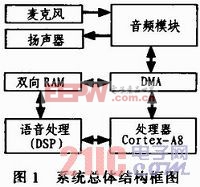
- 摘要:文中阐述的是家庭监护机器人项目中语音识别系统设计的部分,通过DSP、DMA和ARM Cortex-A8的并行处理,利用双缓冲的方法,在嵌入式Linux上实现了基于ATK的实时语音识别系统。文中对该系统的软硬件进行了设计。在
- 关键字:
监护 机器人 实现 家庭 系统 语音 识别 实时
- 医学机器人进入临床医学应用,加拿大卫生部门近日宣称,将在国内推广一种实施神经外科手术的机器人,这种医学机器人有特别敏感的触觉,可以让医生通过最清晰的视觉来完成大脑的显微手术。其精确度可以达到一根头发丝的程度,甚至连最小的神经也有
- 关键字:
机器人

- 1 引言在项目开发中采用从英国进口的SRF05 超声波传感器,它的回波反馈与测距方式与通常使用的超声波传感器相比较特别, 在ARM中实现也稍有难度, 但该传感器精度很高可达到1cm, 因此用该传感器去掉了用于近距离测距
- 关键字:
设计 原理 导航 机器人 移动 超声波
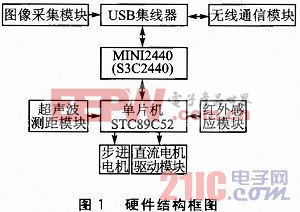
- 基于OPenWrt的移动机器人系统设计,摘要:嵌入式移动机器人实现了全方位自主移动及避障、行走中的图像采集和无线数据传输。采用ARM处理器S3C2440作为主板控制器,选择OpenWrt作为操作系统。系统采用2层架构,上层以S3C2440为核心,负责图像采集,并将图
- 关键字:
系统 设计 机器人 移动 OPenWrt 基于
机器人介绍
您好,目前还没有人创建词条机器人!
欢迎您创建该词条,阐述对机器人的理解,并与今后在此搜索机器人的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473



