节能型循环泵控制器

3.2 滑模观测器算法分析
本文引用地址:https://www.eepw.com.cn/article/265861.htm滑模观测器即是基于上述αβ 定子静止坐标系的数学方程实现的,整个滑模观测器位置估计方法的框图如图 3-1 下:
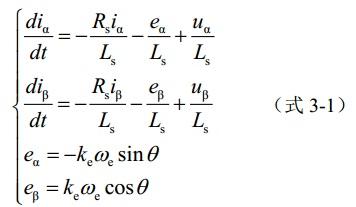
由图 3-1 所示,滑模观测器算法的输入量为:
Rs——定子电阻
Ls——相电感
Ts——控制周期
算法输出量为:
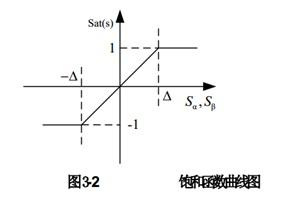
滑模观测器的本质是通过结构变换开关,以很高的频率在滑模面上来回切换,是状态点以很小的幅度在相平面上运动,最终运动到稳定点,从而使得估计值逼近真实值。传统的常值切换滑模控制应用于反电动势观测器时,由于开关时间和空间上的滞后,使得滑模观测器呈现固有的抖动现象。因此使用饱和函数代替开关函数作为切换函数,通过选择合理的边界层厚度削弱抖动。
基于饱和函数的离散滑模观测器为:
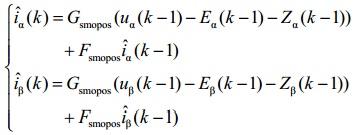
式中

为代替滑模变结构开关函数的饱和函数,函数曲线如图 3-2 所示。图中,∆ 为边界层。
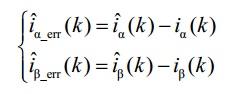
估计电流的误差方程为:
通过滑模变结构进行估计的结果如下:
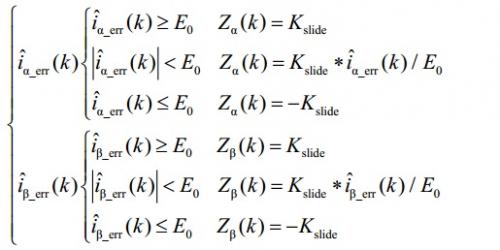
式中,
将滑模估计的结果为开关信号,其中含有反电动势估计值的信息,经过低通滤波器得到估计的反电动势为:
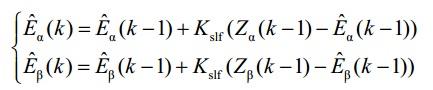
其中
从而求得转子位置为:

对位置微分即可求得转速:
转速信号中包含了滑模所带来的抖动,因此需要对转速进行滤波:
3.3 算法实现
滑模位置估计方法是基于反电动势估计的,电机在零速和低速时反电动势很小,这极大的影响了滑模观测器的性能,甚至是不能工作。因此需要设计另外的算法确保电机启动。最为简单的启动算法是使用压频比(V/F)控制方式启动电机。
为了降低从压频比方式过渡到滑模估计控制方式的电流波动,压频比控制时电流环仍然工作,因此压频比控制的工作原理为:给定电流命令值
当给定电流命令值
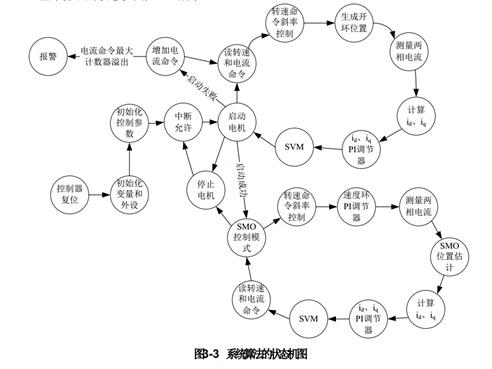
整个算法的状态机图如 3-3 所示:
4、实验结果及分析
电机最小工作转速为 1000rpm,因此电机起动后立刻加速至 1000rpm,稳定后电流波形如下图 4-1 左所示。水泵的最小工作转速为 1200rpm,此转速下的稳态波形如图 4-1 右所示。由两张波形可以看出,在最小工作点电机稳定运行。
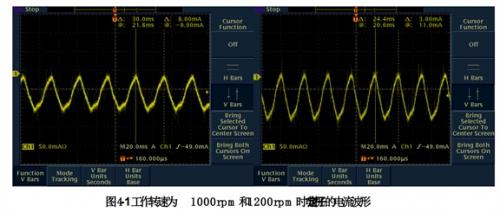
图 4-2 左是电机工作在 2000rpm 时的稳态电流波形,图 4-2 右是电机工作在 3000rpm 时的稳态电流波形。由两张电流波形可以看出,此时电流波形正弦度较高。

表 4-1 列出了在不同转速下的功率和效率数据。数据存在一定的测量误差,但是即使如此,从数据依然可以看出,该水泵系统的高效工作点在 1500rpm 以上。
表4-1 不同转速下的功率和效率数据















评论