富士通无变形显示的3D图像技术

1. 基于多台雷达、摄像头的虚拟三维投影技术、和POV视角还原技术
基于富士通老的全景监控技术,新的全景技术首先在车辆周围建立虚拟的三维场景,再利用激光雷达搜集到的距离信息,将摄像头搜集到的图像投射到三维场景中的相应表面上(图3)。该系统需要准确地布置每台摄像头和雷达的位置和角度,目的在于,当仅靠一个摄像头时,物体背面和侧面位于盲区,但是该盲区可以通过其他摄像头拍到,通过整合,消除盲区。最后合成的图像效果自然,好于仅使用一个摄像头和雷达的效果(图4)。
图3a 
图3b 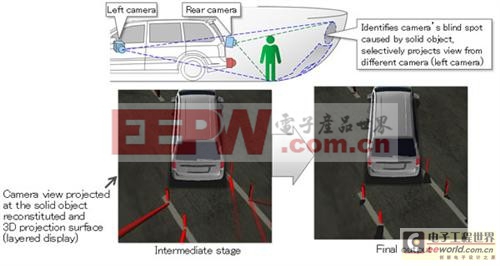
图4
2. 用于碰撞预警的图层叠加技术
三维激光雷达提供距离信息,空间分辨率很高,白天和黑夜都可工作,最大误差为为两厘米。该系统利用雷达信息,可以在三维图像的表面覆盖上不同颜色的警示图层,颜色根据物体的危险程度而定。颜色脉谱图(MAP)是根据距离、行驶方向等制定的,用于决定障碍物表面图层的具体颜色。危险从高到低,颜色也渐渐由红变黄,再到无色(图5)。






评论