单片机设计经验技巧精华集锦(四)

A 寻光
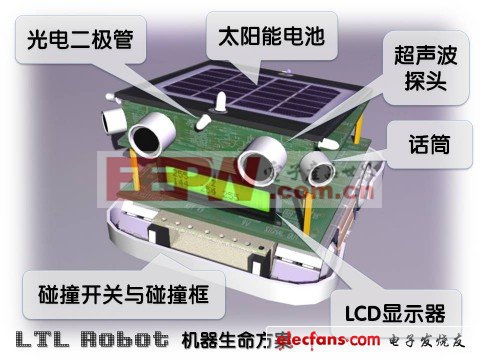
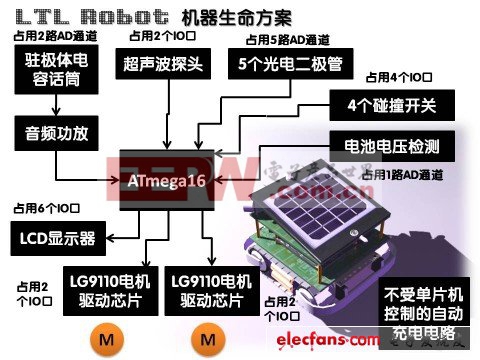
我们可以用光电二极管来检测光线强弱。当然也可以用光敏电阻。将光敏电阻和一个固定电阻串联接在电源正负极之间,光敏电阻靠近正极一侧。从光敏电阻和固定电阻连接点引出导线接到ATmega16的AD转换输入口。当强光照在光敏电阻时,光敏电阻阻值变小,因此其压降变小,而固定电阻分压增多,引出的AD检测电位升高,被单片机转化为数字量后判断光线增强。机器生命有5个光电传感器,其中4个面向机器人前后左右四个方向,另一个指向太阳能板所面对的方向。通过编程可以让机器人自主移动到光线最强的地方。
B 充电
本设计采用4.8V镍氢充电电池为系统供电。太阳能电池板正负极通过一个三极管与电池正负极相连。有一个电压比较器比较电池电压与太阳能板的压差,如果压差高于某值,比较器控制三极管导通,太阳能电池板对充电电池充电。充电电池电压上升,当高于某值时控制三极管关断,结束充电。为使太阳能板能对电池组充电,要求太阳能板在阳光直射下输出电压高于8V。












评论