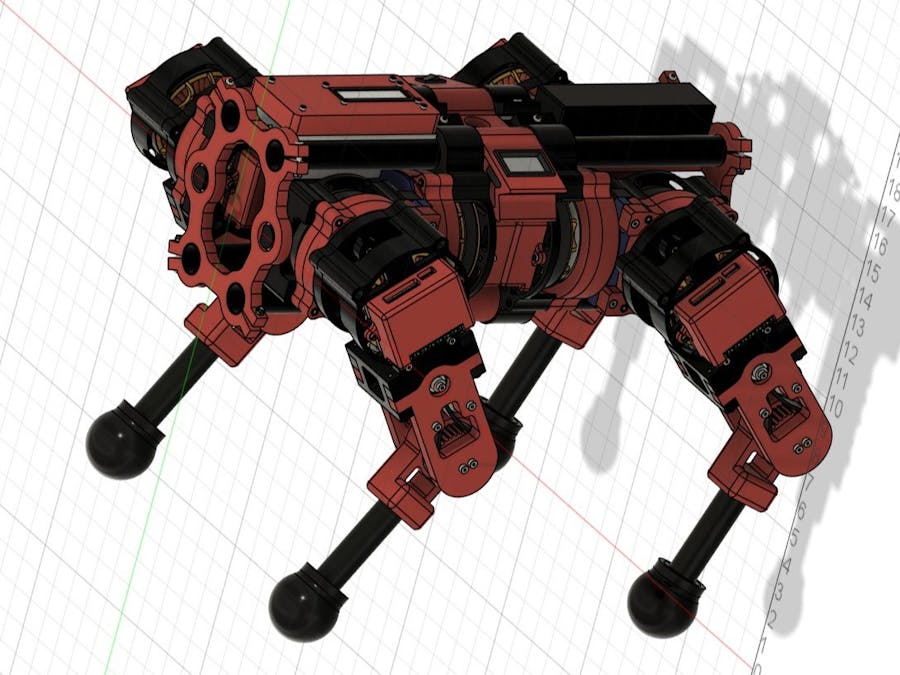
Bolt 四足机器人:结构示意与核心代码深度解析

一、系统结构示意(文字版,可直接配合制图)
1. 分层控制总体架构
Bolt 采用典型的“非实时计算 + 实时控制 + 功率执行”分层设计,其核心思想是:
Linux 侧负责算法与系统调度,MCU 侧负责确定性实时控制,电机驱动器负责高频闭环。
结构层级说明如下:
ROS2 算法与应用层
遥操作(Teleop)
步态规划(Gait Planning)
逆运动学(IK Solver)
环境与定位传感节点(气体、温湿度、氧气、VOC、IMU、相机、雷达等)
数据回传与监控
高层控制层:Raspberry Pi
运行 ROS2 Humble
计算足端轨迹与关节目标(角度/速度)
传感器数据融合
无线通信与远程控制
不直接驱动电机,仅输出结构化运动指令
实时控制层:Teensy 4.1
固定频率执行控制循环
接收关节目标并施加安全约束
统一管理 12 个关节的控制逻辑
通过 CAN 总线与电机驱动器通信
电机控制层:MKS ODrive Mini
BLDC FOC 控制
电流/速度/位置闭环
编码器反馈
多轴并行、确定性执行
执行机构层
12 × BLDC 电机
9:1 减速箱
四条腿,每腿三自由度(Abduction / Hip / Knee)
2. 模块化载荷与任务闭环
Bolt 并非单一运动平台,而是“移动侦察系统”:
机动能力:由四足结构 + 实时控制保障稳定站立、行走与跨障。
信息采集:ROS2 传感节点实时发布气体浓度、环境参数、视觉/深度等数据。
决策支持:操作端可实时监控环境风险,在异常情况下触发告警或停机。
二、实时控制代码核心解析(Teensy 侧)
Bolt 的 Teensy 程序是整个系统的“实时中枢”。其设计重点不在于复杂算法,而在于 稳定、可控、易扩展。

1. 模块化对象设计
代码在初始化阶段即完成关键功能模块的封装:
CAN 与 ODrive 控制对象
统一管理 12 个电机轴,通过 CAN 总线发送位置/模式指令。遥控接收模块(RC Receiver)
将多通道 PWM 信号映射为行走、转向、模式切换等控制输入。LCD 本地交互模块
提供模式选择、校准提示与状态确认,避免误操作。逆运动学模块(IK)
根据腿部几何参数,将足端 (x, y, z) 坐标转换为关节角度。
工程意义:
Teensy 主循环只做调度与安全控制,而非混杂通信、UI 与数学计算,结构清晰,便于后期维护。
2. 标定数据:offset 与 dir 的关键作用
每条腿、每个关节都存在机械与装配差异。代码通过两组数组解决这一现实问题:
offset(关节零位偏置)
将理论关节角对齐到实际机械零位。
不同腿、不同关节可独立配置。
dir(方向系数 ±1)
统一不同电机安装方向导致的正负号差异。
确保“同一动作指令”在四条腿上语义一致。
结论:
这两张表是四足机器人“能否稳定站起来”的关键,比算法本身更重要。
3. 从足端坐标到电机位置:核心控制链
实时控制的核心逻辑可概括为四步:
逆运动学计算
输入足端坐标,得到每个关节的理论角度(deg)。零位与方向修正
使用 offset 与 dir 将理论角度映射到实际机械坐标系。单位换算
角度 → 转数
乘以减速比(9:1)
得到电机轴的目标位置
下发至 ODrive
每条腿 3 个轴
总计 12 轴并行更新
这种设计使得:
上层算法只关心“腿往哪放”;
下层驱动只关心“电机转多少”。
4. 步态生成方式:关键帧序列法
当前实现采用 足端关键帧 + 时间延迟 的方式生成步态:
抬脚 → 前摆 → 落脚 → 重心转移
通过多次调用位置更新函数并插入延时实现节律
支持前进、后退、左右平移与组合动作
工程评价:
优点:
逻辑直观
便于调试与标定
适合原型验证阶段
局限:
依赖延时函数,占用主循环
难以扩展到高速或复杂地形
5. 遥控与状态机设计:面向真实场景的安全逻辑
程序并未直接“通电即动”,而是引入明确的状态机:
待机状态:仅显示信息,不使能电机
模式选择:通过遥控通道切换功能
确认机制:短按切换、长按确认
分腿校准:每次只校准一条腿,降低风险
这种设计显著降低了在狭小空间或调试阶段的误操作风险,是工程化实现的重要体现。
6. Teleop(遥操作)模式的初始化逻辑
在进入行走前,程序会:
依次使能 12 个电机轴
统一配置控制模式(位置/速度环)
按关节类型设置参数(而非逐轴单独调参)
进入持续遥控循环,根据摇杆实时触发步态
这种“集中初始化 + 统一参数模板”的方式,大幅提升了系统一致性和可维护性。
三、工程总结
Bolt 的价值并不只在于“四足会走”,而在于其 清晰的系统分层、务实的实时控制策略以及面向真实应用的安全设计:
Raspberry Pi 专注算法与通信
Teensy 专注确定性控制
ODrive 专注高性能电机闭环
标定与状态机保障系统可控
这一架构为后续引入力控、更高级步态规划或学习算法打下了扎实基础,也具备向工业级应用演进的潜力。


评论