基于MEMS组合模块的姿态检测系统设计

2 仿真验证
应用文中构造的数据融合模型,通过Matlab工具对实测原始数据进行仿真,验证此模型的有效性。加速度计原始信号如图5所示。本文引用地址:https://www.eepw.com.cn/article/194995.htm
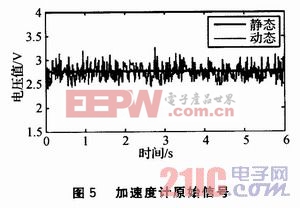
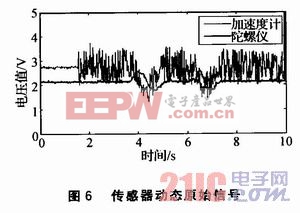
这是加速度计在动态和静态时的原始信号输出对比,可见加速度计的动态输出由于存在高频干扰,致使输出数据完全不能准确地反映真实的姿态值。被测平台发生倾斜时采集的加速度计和陀螺仪的原始信号值如图6所示。可以看出,在1.6 s之前被测平台没有受到震动干扰,此时加速度计的输出信号振幅较小。在1.6 s之后,被测平台受到震动干扰,加速度计的输出信号受到严重干扰,而陀螺仪的输出信号几乎不受震动干扰。
数据融合结果如图7所示。其中,加速度计曲线是通过对加速度计原始信号计算得到的角度值,可见依然波动较大。陀螺仪曲线是通过对陀螺仪的输出角速度值进行积分运算所得的角度值。数据融合曲线是通过文中构造的数据融合模型进行解算得到的角度值。
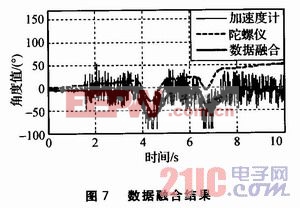
由图7可以看出,由单一的加速度计得出的角度值波动很大,不能准确反映真实值。由单一的陀螺仪经过积分运算得到的角度值虽然没有波动,但随着时间的增大,产生的积分累积效应将非常严重。从0 s到10 s,陀螺仪产生的积分累积偏差接近了50°,并以平均5°/s的速度加速扩大。这也是不能单独使用陀螺仪进行平台姿态检测的原因。而经过数据融合处理后得到的角度值,既克服了加速度计动态性能差的缺点,又很好地补偿了陀螺仪的积分飘移。
3 系统实现
3.1 硬件设计
在电路板设计之初,需要根据加速度计、陀螺仪的敏感轴方向确定传感器的安装位置和角度。陀螺仪和加速度计应安装在较近的位置,尽量减少两传感器的外部环境差异,这有利于减少后期数据处理的误差。在平台刚性接触面是否采取防震处理,如加入防震垫片等措施,这对于传感器的输出有很大影响,尤其是对加速度计的影响尤为突出。










评论