CPLD在DSP系统中的应用设计

当系统出现错误时,可以采用手工方式复位。
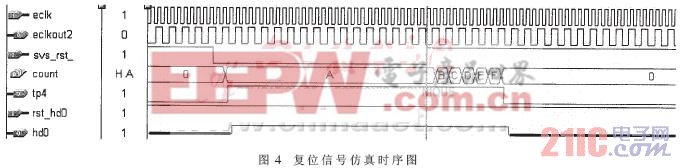
复位信号产生原理图如图2所示。其中,RST#为整个系统的复位信号,由MAX7000输出。PBSW_RST#为手动复位信号,由按键接入MAX7000,经MAX7000去抖动后输出给TPS3307。SVS_RST#为电源管理芯片TPS3307产生的复位信号(包括手动复位和电源监控功能)。本文引用地址:https://www.eepw.com.cn/article/191213.htm
1.2.2 BOOT模式的实现
系统复位后,DSP需要进行BOOT自举。在复位信号为低期间,BOOTMODE[4:0]管脚上的设置值被锁存,决定芯片的存储器映射方式以及自举模式。但TMS320C6202没有专门的管脚作为BOOTMODE[4:0]输入管脚,而是将扩展总线的XD[4:0]映射为BOOTMODE[4:0],利用上拉/下拉电阻在复位时进行芯片启动模式设置。总线上的其它位也在复位期间被锁定,决定系统相应的设定值。而扩展总线XD在HPI口读写时要用到,所以使用MAX7000进行隔离。系统处在复位阶段,则通过MAX7000使得DSP的相应管脚的值等于设定值,复位结束后,MAX7000相应管脚为高阻态,使得XD可以作为正常的总线使用。
DSP自举有特定的时间要求。在复位结束后,XD的配置管脚必须保持一段时间,TMS320C6202要求时间为5个时钟周期,例如在200MHz时钟情况下必须保持25ns。
1.2.3 HPI口接口逻辑实现
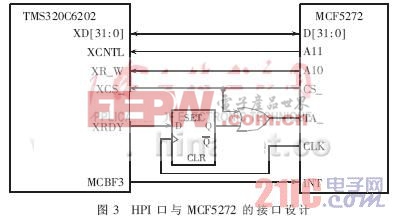
MPEG-4压缩编码器压缩后的数据,通过网络传输控制模块传输到网络上去,从而实现网络实时图像传输。而DSP与网络传输模块(MCF5272)通过HPI口连接。其接口逻辑由CPLD完成。硬件连线图如图3所示。
根据系统的逻辑要求以及实际的仿真结果,CPLD选用EPM7128SLC84。该芯片共有2500门,128个宏单元,最多100个用户自定义管脚。
2 CPLD逻辑控制的具体实现
2.1 复位信号的实现
复位信号逻辑产生较简单,需要处理的是按键的去抖动。由于按键是机械触点,当机械触点断开、闭合时会有抖动,为使每一次按键只作一次响应,就必须考虑去除抖动。在通过按键获得复位信号为低的信息时,不是立即认定按键已被按下,而是延时一段时间后再次检测复位信号。如果仍为低,说明按键的确按下了,这实际上是避开了按键按下时的抖动时间。同样,在检测到按键释放后,再延时几个毫秒,消除后沿的抖动,然后再对键值处理。由于抖动现象主要出现在按键按下后,采用延时方法可有效地减少按键的抖动现象。











评论