单片机和CPLD的望远镜伺服控制器设计

大型光电望远镜属于大惯量系统,机械时间常数远大于电气时间常数,故可忽略电气时间常数的影响。对象的速度传递函数可简化为:
式中,Tm是机械时间常数,K是增益。因此可以选择内模控制器为:本文引用地址:https://www.eepw.com.cn/article/173232.htm

式中,λ是滤波器参数。如图5所示,点画线内的部分可等效为反馈控制器:
![]()
当模型匹配时,存在内模控制系统闭环为一惯性环节。它的时间可以依据需要进行调节,λ值小有利于动态性能,λ值大则有利于增强鲁棒性。对于内模控制器输出不饱和而言,其等效于反馈控制器PI,因而,系统对阶跃输入和阶跃扰动的稳态误差为零,其抗干扰能力与常规PI完全一致。采用增量式PID控制算法,控制变量为:

式中,ek为第k步时刻速度误差,Ts为采样周期,μ(k)为当前控制量输出。
4 实验结果
采用基于高速单片机C8051F120和CPLDEPM570T100设计的伺服控制器硬件平台,实现大型望远镜转台的速度控制,驱动功率级采用H桥双极性功率放大器,反馈采用直径为413 mm的圆光栅,栅道64800,细分1000,分辨率为0.02/s,采样周期1 ms,控制回路计算时间测得为120μs,包含圆光栅数据读取时间。望远镜的一转台的速度传递函数为: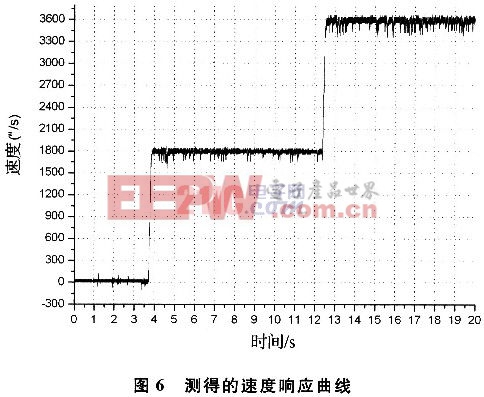
利用板上的通信口发送实际的速度值(波特率115200bps,1ms发送1次),由上位计算机记录数据,测得的速度响应曲线如图6所示。起始阶段电机以20/s的低速度运行,中间升至1800/s,最后达到3600/s,可见每个阶段的速度都非常平稳。在实际数据处理时,需要对零
位信号时刻的圆光栅数据进行处理,因该光栅有零位信号输出,计算速度时要进行合理的辨别方向和大小分析处理。
结语
本文采用高速单片机和CPLD组成望远镜伺服控制器,实现了圆光栅四倍频细分电路、计数模块以及电机PWM驱动控制信号产生,并用单片机实现了内模控制算法、LCD显示和数据通信等功能。最终通过实验验证了该系统的可行性。

pid控制器相关文章:pid控制器原理












评论