单片机复位电路分析

(d/dt)UA(t)=(1/RC)URST(t)+(d/dt)URST(t)
URST(0)=0
解之得:

从上式可以看出,由于负载的突变和稳压电源的稳压作用,将在复位端引入一个类脉冲,从而导致CPU工作不正常。
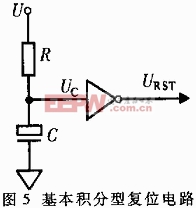
此电路的等效电路如图5所示。仍以高电平复位为例,同样可以建立如下方程:
当系统上电时,假设Us(t)=AU(t)为阶跃函数,U0=0,则:

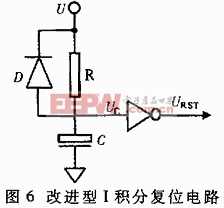
当反相器正常工作后,Uc若仍能保持在VIL以下,则其输出就可以为高电平;而且如果从反相器正常工作后开始,经过不小于复位脉冲宽度的时间TR后,Uc才能达到VIL以上,那么上电复位就能保证可靠。所以在实际应用中,设计人员常常将R、CF的值增大以提高时间常数,并且应用具有斯密特输入的CMOS反相器以提高抗干扰性。然而此复位电路常常在二次电源开关相对较短的时间间隔情况下出现异常。这主要是由于放电回路与充电回路相同,导致放电时间常数较大,从而导致UC电压下降过度。为此有文献[2]介绍如图6所示的改进电路。
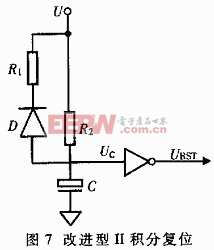
从图6可以看出放电回路的时间常数一般远远小于充电时间常数。这时,上面所提到的重复开关电源而造成上电复位不可靠的现象就可以得到控制。然而,由于放电时间常数过短,降低了此复位电路在工作中对电源电压波动的不敏感性。例如,当电源电压有波动时,此时由于放电过快,从而有可能造成Uc低于反相器的VIL电压值,带来不必要的复位脉冲。此现象在单片机工作于Sleep方式与Active方式切换,而电源输出功率又相对较弱时可能出现。为此提出针对以上现象的改进积分型复位电路(如图7所示)。图7中,R1R2,适当调整R1值的大小就可避免以上情况发生。
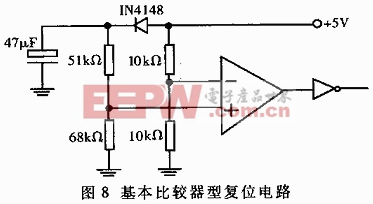
1.3 比较器型复位电路
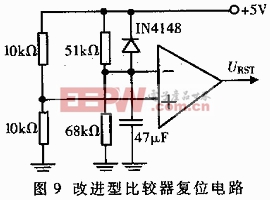
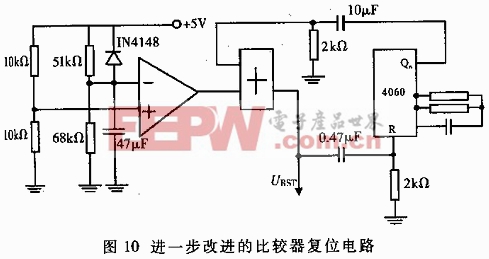
比较器型复位电路的基本原理如图8所示。上电复位时,由于组成了一个RC低通网络,所以比较器的正相输入端的电压比负相端输入电压延迟一定时间。而比较器的负相端网络的时间常数远远小于正相端RC网络的时间常数,因此在正端电压还没有超过负端电压时,比较器输出低电平,经反相器后产生高电平。复位脉冲的宽度主要取决于正常电压上升的速度。由于负端电压放电回路时间常数较大,因此对电源电压的波动不敏感。但是容易产生以下二种不利现象:(1)电源二次开关间隔太短时,复位不可靠;(2)当电源电压中有浪涌现象时,可能在浪涌消失后不能产生复位脉冲。为此,将改进比较器重定电路,如图9所示。这个改进电路可以消除第一种现象,并减少第二种现象的产生。为了彻底消除这二种现象,可以利用数字逻辑的方法与比较器配合,设计如图10所示的比较器重定电路。此电路稍加改进即可作为上电复位与看门狗复位电路共同复位的电路,大大提高了复位的可靠性。
1.4 看门狗型复位电路
看门狗型复位电路主要利用CPU正常工作时,定时复位计数器,使得计数器的值不超过某一值;当CPU不能正常工作时,由于计数器不能被复位,因此其计数会超过某一值,从而产生复位脉冲,使得CPU恢复正常工作状态。典型应用的Watchdog复位电路如图11所示。此复位电路的可靠性主要取决于软件设计,即将定时向复位电路发出脉冲的程序放在何处。一般设计,将此段程序放在定时器中断服务子程序中。然而,有时这种设计仍然会引起程序走飞或工作不正常[3]。原因主要是:当程序“走飞”发生时定时器初始化以及开中断之后的话,这种“走飞”情况就有可能不能由Watchdog复位电路校正回来。因为定时器中断一真在产生,即使程序不正常,Watchdog也能被正常复位。为此提出定时器加预设的设计方法。即在初始化时压入堆栈一个地址,在此地址内执行的是一条关中断和一条死循环语句。在所有不被程序代码占用的地址尽可能地用子程序返回指令RET代替。这样,当程序走飞后,其进入陷阱的可能性将大大增加。而一旦进入陷阱,定时器停止工作并且关闭中断,从而使Watchdog复位电路会产生一个复位脉冲将CPU复位。当然这种技术用于实时性较强的控制或处理软件中有一定的困难。

DIY机械键盘相关社区:机械键盘DIY











评论