模糊控制在开关磁阻直线电机上的应用

3 LSRM线性电感模型
一般在进行开关磁阻电机控制时对电感模型做线性化处理,在线性模型中做如下假设:
(1)忽略磁通边缘效应和磁路非线性,且磁导率为无穷大,因此绕组电感是动子位置函数的分段线性函数;
(2)忽略所有功率损耗;
(3)功率管开关动作瞬间完成;
(4)电机恒速运转。
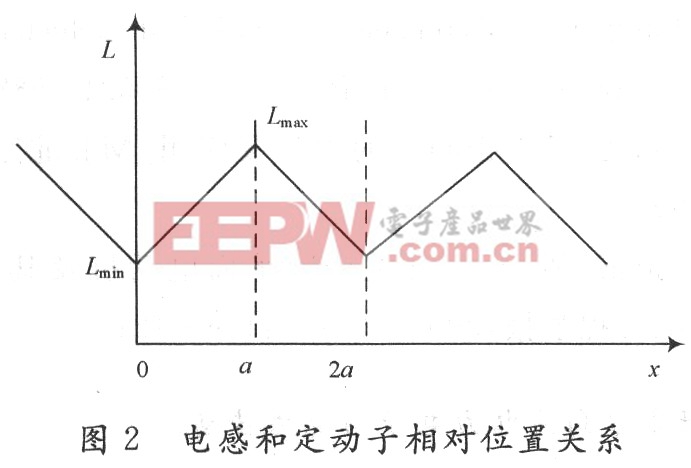
LSRM移动时动子的凸极对应定子的凹极时,电感最小,对应定子的凸极时,电感最大,电机在运动的过程中,电感会发生周期性变化,这个周期,称之为电感周期。本文后面所讨论的电流的控制以及瞬时力矩的控制都是在一个电感周期内来讨论的。电感和定动子相对位置关系如图2所示。
| |
4.2 模糊控制器的设计
选取7个常用的语言变量值,即负大(NB)、负中(NM)、负小(NS)、零(ZE)、正小(PS)、正中(PM)和正大(PB)。位移偏差E,位移偏差变化量EC及控制量I的模糊子集均为{NB,NM,NS,ZE,PS,PM,PB}。图5是它们的隶属度函数。
|








评论