基于两轴角传感器的机动测控装备自动调平系统

2 传感器数据采集软件
2.1 传感器数据输出格式
XWQJ02-001数据输出为串口信号,串口输出协议为:波特率为9 600 b/s,没有校验位、8个数据位,1个停止位,即(9 600,N,8,1)。一组数据为15个字节数,并且输出为16进制数,具体如表1所示。本文引用地址:https://www.eepw.com.cn/article/162811.htm
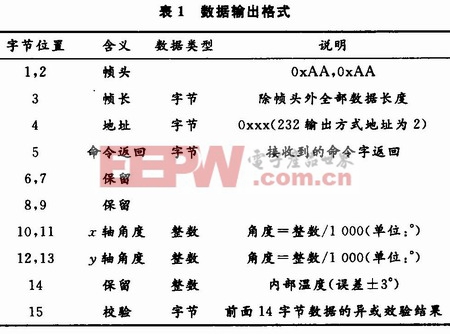
表中x,y轴角度的字节中,最高比特位为O表示正数,最高比特位为1,表示负数。
2.2 软件编写
使用微软公司的Visual C++6.O编写串口通信程序,调用软件本身提供的通用串口控件MSCOMM32.OCX编写程序,串口命名为m-Com。
软件的初始化程序如下:

当串口接收缓冲区接收到一组15个字节的数据后就自动产生一个OnComm事件,然后执行数据处理程序,数据格式转换关键步骤的程序如下所示:

这样就转化为可以按照一般的数学计算法则处理的数据类型。
具体如何处理数据与传感器使用的具体情况有关系,如在大型设备的平台调平系统中,应该将倾角值转化为各个支撑平台支腿的伸长量。
















评论